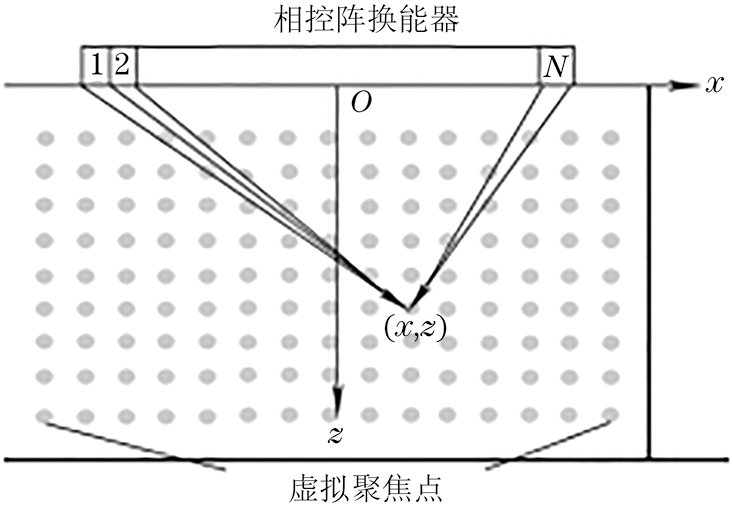
图 1 全聚焦成像原理示意

奥氏体焊缝具有柱状晶组织、晶粒粗大、各向异性等特征,故当超声波在焊缝中传播时,会严重受到其弹性各向异性的影响,进而出现声速变化、散射衰减增大、波束偏移以及检测信噪比低等问题,给缺陷的检出、精确定量和定位带来了极大的困难[1]。双晶面阵列探头是解决奥氏体不锈钢焊缝等粗晶材料超声检测的主要技术手段,主要研究方向包括探头设计、超声检测工艺开发与试验验证等[2-4]。相控阵超声检测技术具有灵活的声束可控性、较强的检测适应性、良好的缺陷检出率等特点,已在奥氏体焊缝检测中得到了成功应用[5-6]。但其扫描声束范围有限,导致聚焦效果受到影响。近年来兴起的全聚焦检测,优点在于其成像质量远远优于常规相控阵超声方法的成像质量,检测结果具有较高的信噪比和孔型缺陷形状还原度,可在一定程度上克服厚壁奥氏体不锈钢焊缝的检测信噪比低、难度大等问题。因此,文章利用CIVA 仿真平台,建立厚壁奥氏体不锈钢焊缝模型,基于TRL面阵探头对其全聚焦检测成像模式进行仿真与分析,为厚壁奥氏体不锈钢焊缝的全聚焦成像检测工艺的制定提供参考。
全聚焦(Total focusing method,TFM)成像是一种特殊的相控阵超声检测技术。其实现方式是逐一激发阵列探头的单个(或多个)阵元,同时所有(或设定的)阵元组接收信号,依次遍历激发所有阵元(或阵元组)之后,根据延迟法则对目标网格化区域内的每一个点进行计算和成像,其原理示意如图1所示。
TFM的成像质量远远优于常规相控阵超声成像方法的,且可根据不同成像路径,实现多种成像模式,如图2所示。
由图2可知,探头与缺陷间存在L、T、LL、LT、TL或TT(L表示纵波,T表示横波)6种成像路径。考虑到声束互逆性,诸如LL-TL、LT-LL两种模式波具有相同的声传播路径,在多模式全聚焦成像中可被视为一种模式波。因此,经排列组合可得,多模式全聚焦成像的3类模式共包含21种模式波,分别为3种直接模式、8种半跨模式和10种全跨模式。其中,每种模式波的重建图像被称为视图,全部21种视图如表1所示。对比常规全聚焦成像,多模式全聚焦成像考虑了更多的成像路径,扩大了可重建缺陷的范围。
| 模式 | 视图 |
|---|---|
| 直接模式 | L-L、T-T、L-T |
| 半跨模式 | LL-L、LL-T、LT-L、LT-T、TL-L、TL-T、TT-L、TT-T |
| 全跨模式 | LL-LL、LL-LT、LL-TL、LL-TT、LT-TT、LT-LT、LT-TL、TL-TT、TL-TL、TT-TT |
CIVA仿真软件在材料特性模拟、检测技术模拟、缺陷检测与评估、试验验证与优化方面具有一定的优势。基于对奥氏体不锈钢主管道焊缝全聚焦成像工艺设计仿真的需要,文章选取CIVA仿真平台进行建模。
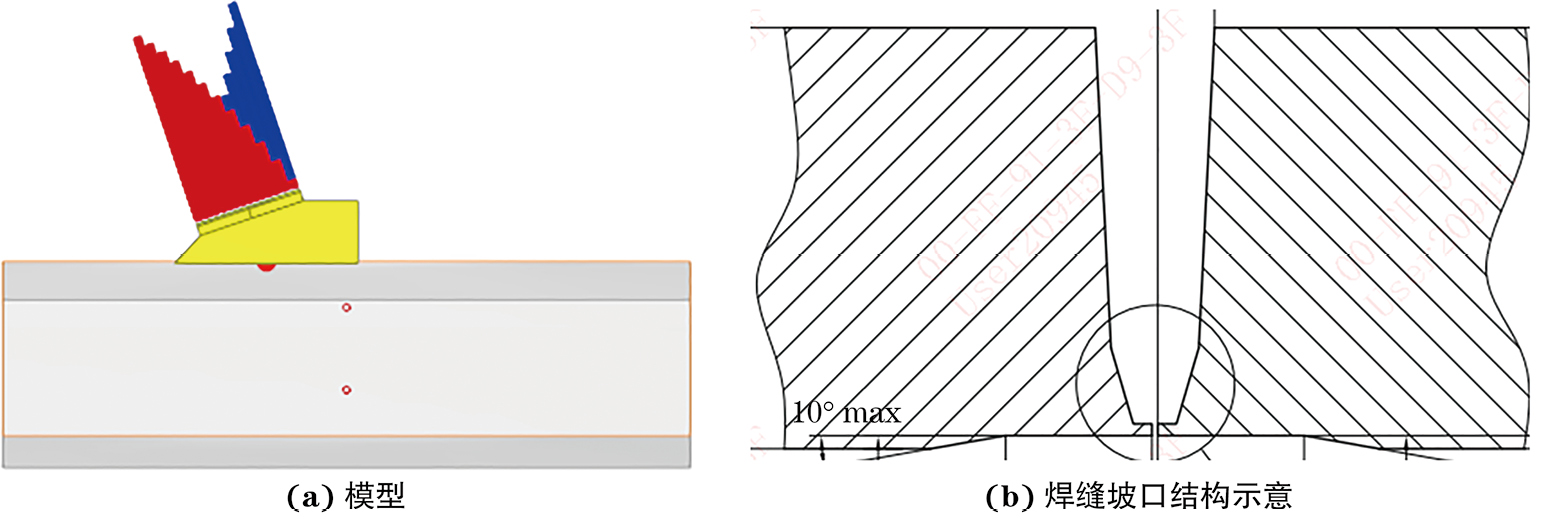
基于奥氏体不锈钢主管道相关结构参数,在AutoCAD软件中制作三维模型,包括母材及焊缝部分,截取整个管道中的60°范围区域作为仿真试件,如图3所示。利用制作的焊缝三维CAD模型,在仿真平台中建立奥氏体不锈钢主管道焊缝检测模型。CIVA相控阵超声检测模型及焊缝坡口结构示意如图4所示。
同时,文章选取厚度为76 mm的奥氏体不锈钢主管道焊缝对比试块,利用中心频率为1.5 MHz,阵元排布为8×4的TRL面阵探头分别获取焊缝部分和母材部分中深度分别为10,30,60 mm的?3.2 mm侧钻孔的试验信号。在仿真模型中建立相同缺陷并获取相应的仿真信号,然后与试验信号对比,对比结果如表2所示。
| 区域 | 孔深/mm | 扫查角度/(°) | 试验信号信噪比/dB | 仿真信号信噪比/dB | 平均信噪比误差/dB | 相对误差/% |
|---|---|---|---|---|---|---|
| 母材 | 10 | 60 | 20.92 | 25.76 | 0.95 | 4.11 |
| 70 | 24.03 | 23.95 | ||||
| 30 | 45 | 23.58 | 22.78 | |||
| 60 | 23.34 | 21.99 | ||||
| 60 | 45 | 23.58 | 25.73 | |||
| 焊缝 | 10 | 60 | 20.92 | 21.82 | 0.24 | 1.14 |
| 70 | 19.89 | 19.90 | ||||
| 30 | 45 | 20.92 | 19.88 | |||
| 60 | 24.12 | 25.11 | ||||
| 60 | 45 | 19.37 | 17.28 |
对于母材和焊缝,得到的仿真信号与试验信号的信噪比误差为0.95 dB和0.24 dB,相对误差分别为4.11%和1.14%,验证了仿真模型的有效性。
为了分析不同种类、尺寸和位置缺陷的全聚焦仿真成像结果,文章基于仿真模型,在焊缝中设置了参数如表3所示的仿真缺陷。
| 序号 | 缺陷类型 | 深度 | 尺寸设置 |
|---|---|---|---|
| 1 | 体积型缺陷(气孔) | 6,38,70 | ?2.0 |
| 2 | 面积型缺陷(裂纹) | 10,38,60 | 长度为10,高度为2 |
| 3 | 侧壁未熔合 | 6,38,70 | 长度为10,高度为2 |
文章采用TRL面阵探头,仅用纵波进行发射和接收,可简化为1种直接模式(L-L)、1种半跨模式(LL-L)和1种全跨模式(LL-LL)。下面将以焊缝不同位置的不同类型缺陷作为参考,对比不同全聚焦成像模式的特点,选择更适宜的全聚焦成像模式。
针对上文缺陷设置,分别进行不同模式的全聚焦仿真成像,并对仿真成像的结果进行对比分析。
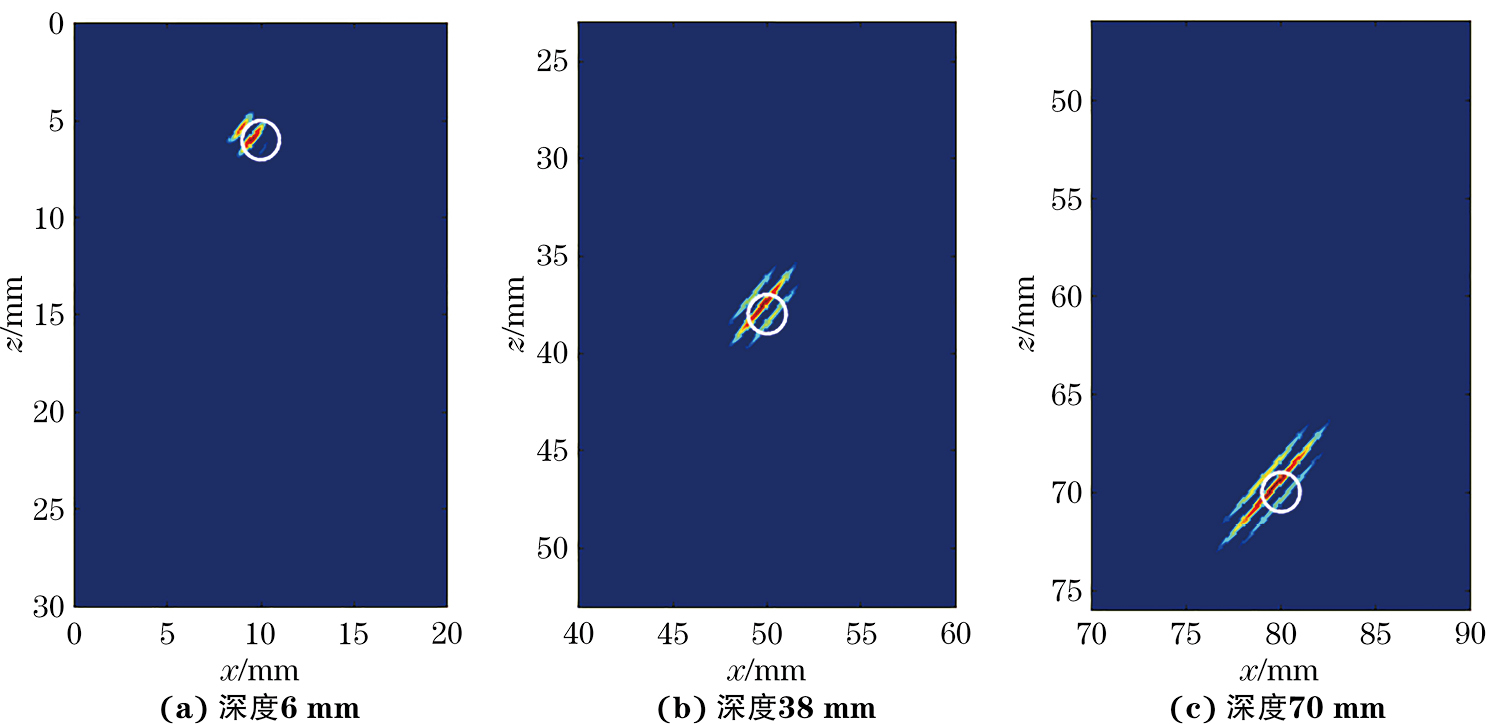
为分析不同位置气孔缺陷的全聚焦成像检测能力,在厚度为76 mm的奥氏体不锈钢焊缝仿真模型中分别设置深度为6,38,70 mm,直径为2.0 mm的气孔缺陷,并通过对比不同模式的全聚焦成像结果,分析成像模式对成像效果的影响,其全聚焦直接模式成像仿真结果如图5所示。
由图5可知,深度分别为6,38,70 mm,直径为2 mm的气孔缺陷在直接模式全聚焦成像中清晰可见,且该模式能够表征气孔缺陷的上表面位置,相比相控阵超声扇形扫查成像,全聚焦成像受到奥氏体不锈钢焊缝各向异性的噪声影响更小,更容易判断缺陷的数量和位置,利于定量分析。由于发射的超声波声束脉冲为多周期高斯脉冲,存在数个波峰,因此在气孔的全聚焦成像中,可以观察到气孔的上表面处包含2~3个条状像,与多个小气孔的成像结果类似。在实际检测中,多个小气孔缺陷和一个大尺寸气孔缺陷对焊缝力学性能的影响往往并不相同,因此需要对缺陷的数量和尺寸进行确认。这可以通过调整探头位置改变超声声束入射角度来确认,若为大气孔缺陷,则条状像的角度改变,位置也会改变,向声束新覆盖的气孔上表面移动;若为多个小气孔缺陷,则条状像仅角度改变,位置基本不变。
为进一步对气孔缺陷进行定量分析,整理深度分别为6,38,70 mm,直径为2 mm气孔缺陷的全聚焦成像定位和尺寸定量误差,结果如表4所示。
| 序号 | 深度 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|
| 1 | 6 | 2.51 | 0.51 | 0.58 |
| 2 | 38 | 3.72 | 1.72 | 0.56 |
| 3 | 70 | 4.01 | 2.01 | 0.55 |
由表4可知,气孔缺陷平均定位误差为0.56 mm,定位误差较小,全聚焦成像基本可以表征气孔缺陷在焊缝中的位置;气孔缺陷平均尺寸定量误差为1.41 mm,可以观察到,受到奥氏体不锈钢焊缝各向异性的影响,随着深度增加,超声波声束出现发散,导致气孔缺陷的反射回波成像偏大。
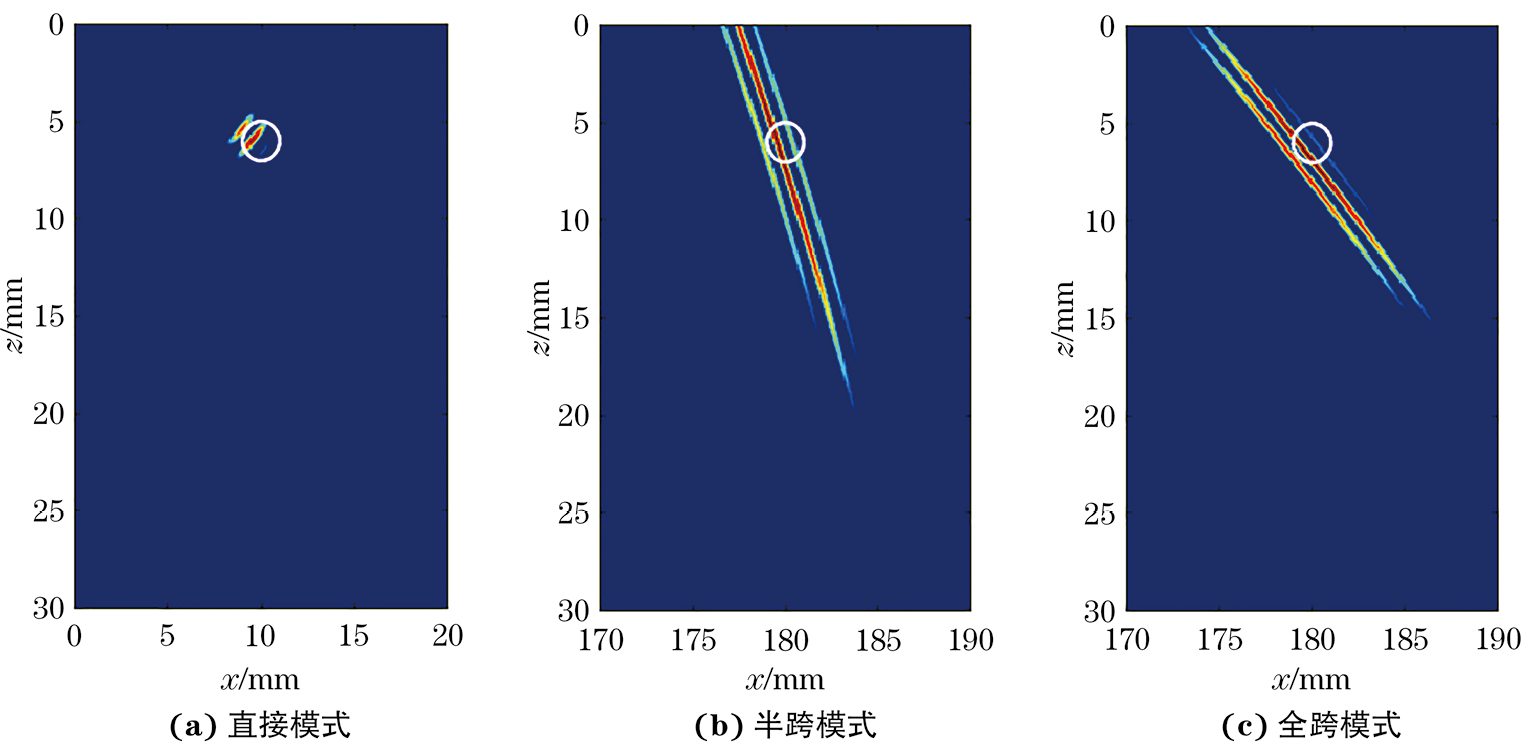
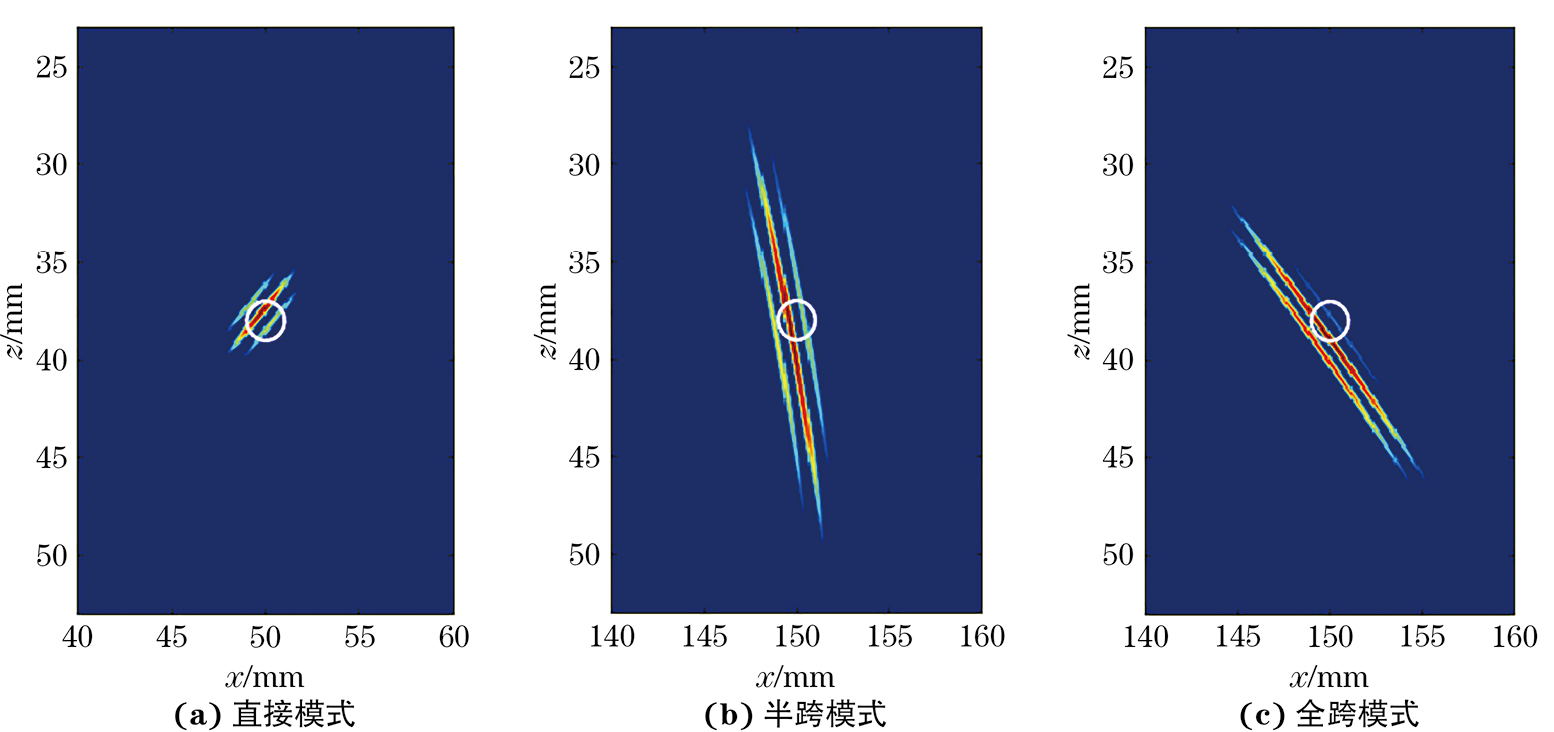
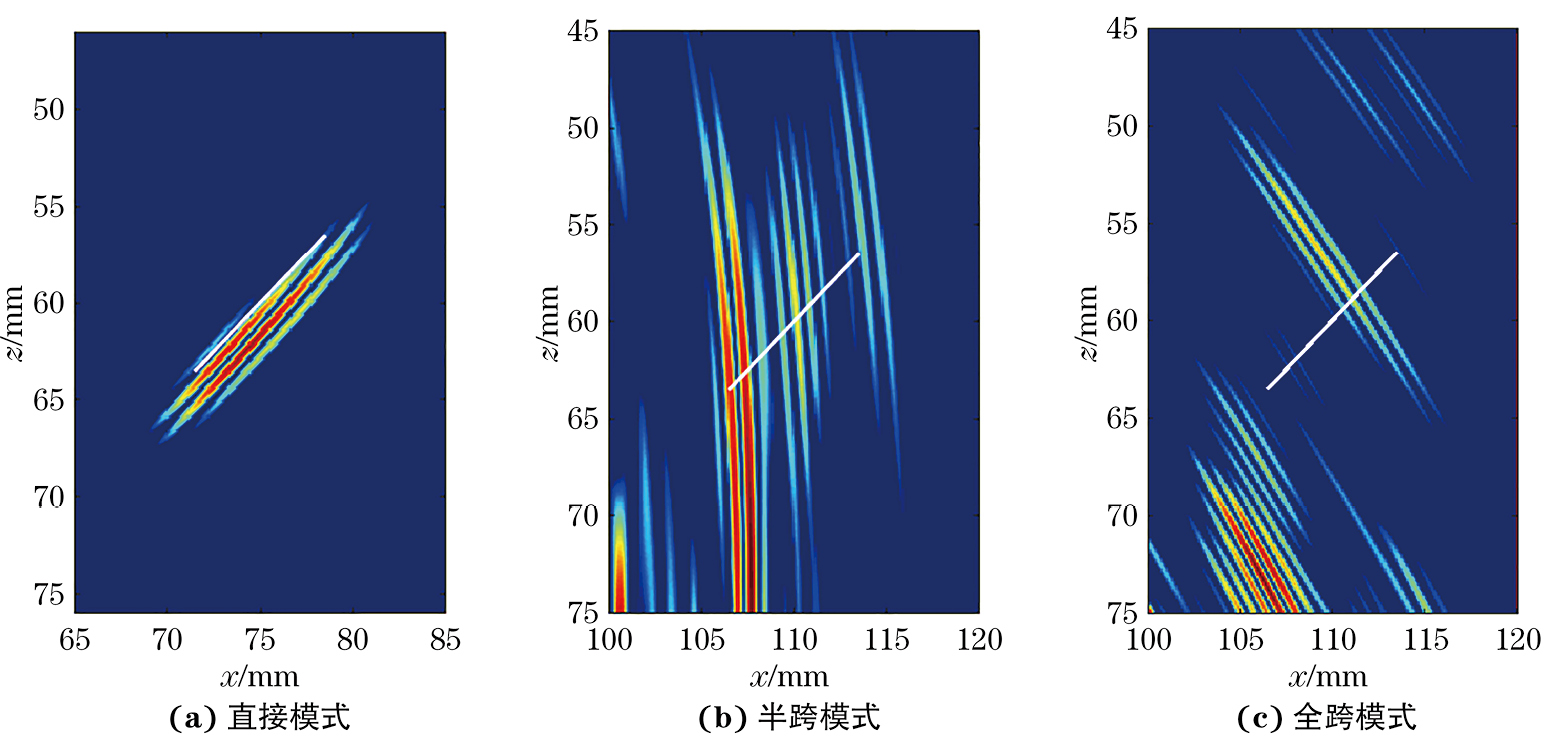
为了比较不同全聚焦成像模式对气孔缺陷成像结果的影响,选取不同深度,直径为2 mm的气孔缺陷进行试验,其直接模式、半跨模式和全跨模式成像结果对比如图6至图8所示。
由图6至图8可知,半跨模式和全跨模式的气孔缺陷成像拖尾都较长,远大于直接模式全聚焦成像结果。这主要是半跨模式和全跨模式下的超声波传播时间较长,声束发散较严重,导致对气孔缺陷尺寸估计的误差偏大。但3种模式下的成像都可以较好地表征气孔缺陷所在的位置。
为进一步说明3种成像模式对气孔缺陷的检测能力,计算气孔缺陷在不同全聚焦成像模式下的定位和尺寸定量误差,结果如表5所示。
| 序号 | 深度 | 成像模式 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|---|
| 1 | 6 | 直接 | 2.51 | 0.51 | 0.58 |
| 2 | 半跨 | 14.29 | 12.29 | 0.67 | |
| 3 | 全跨 | 12.16 | 10.16 | 0.58 | |
| 4 | 38 | 直接 | 3.72 | 1.72 | 0.56 |
| 5 | 半跨 | 12.37 | 10.37 | 0.64 | |
| 6 | 全跨 | 9.35 | 7.35 | 0.64 | |
| 7 | 70 | 直接 | 4.01 | 2.01 | 0.55 |
| 8 | 半跨 | 4.70 | 2.70 | 6.50 | |
| 9 | 全跨 | 11.67 | 9.67 | 0.14 |
综上所述,检测气孔缺陷时,使用直接模式成像的定位误差和尺寸定量误差更小,故应选择全聚焦直接模式成像对气孔缺陷进行检测。
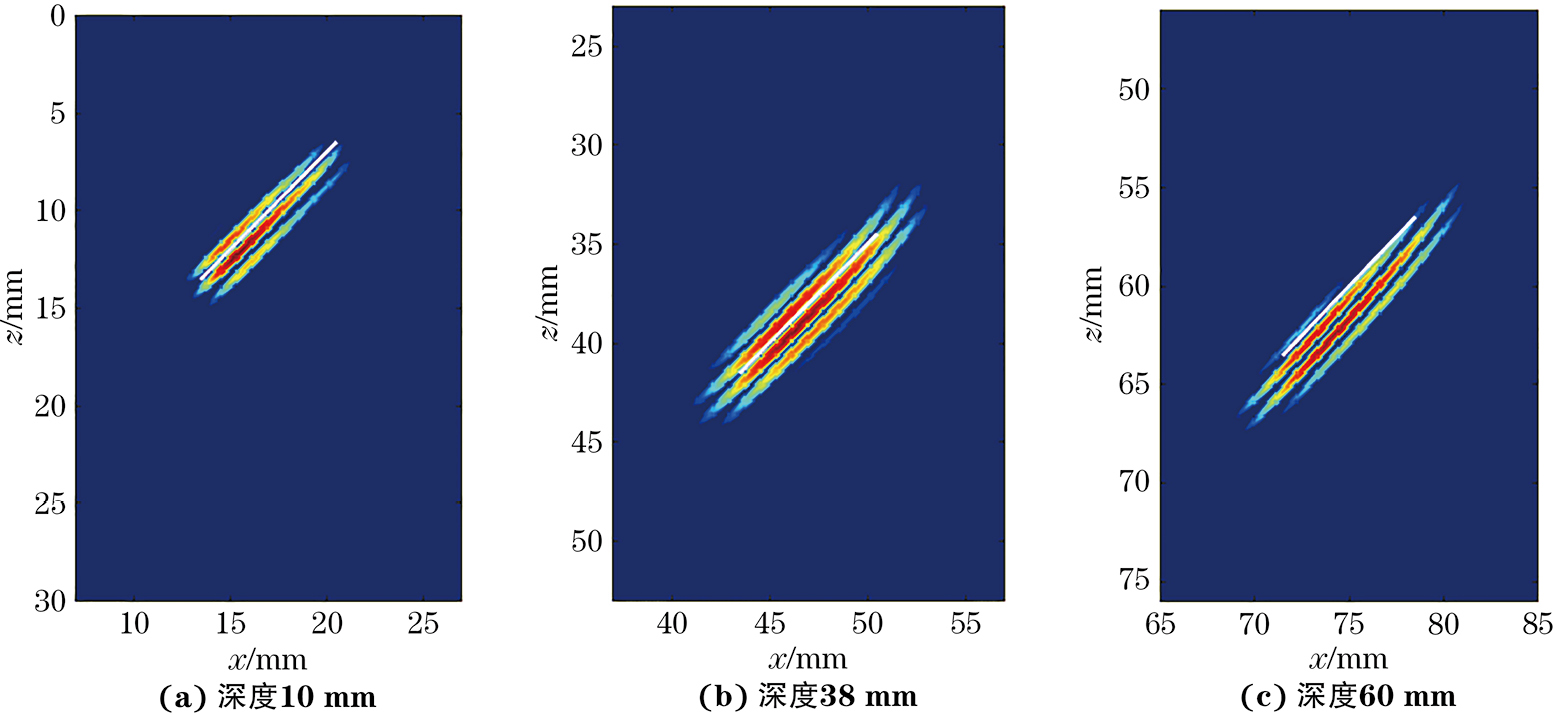
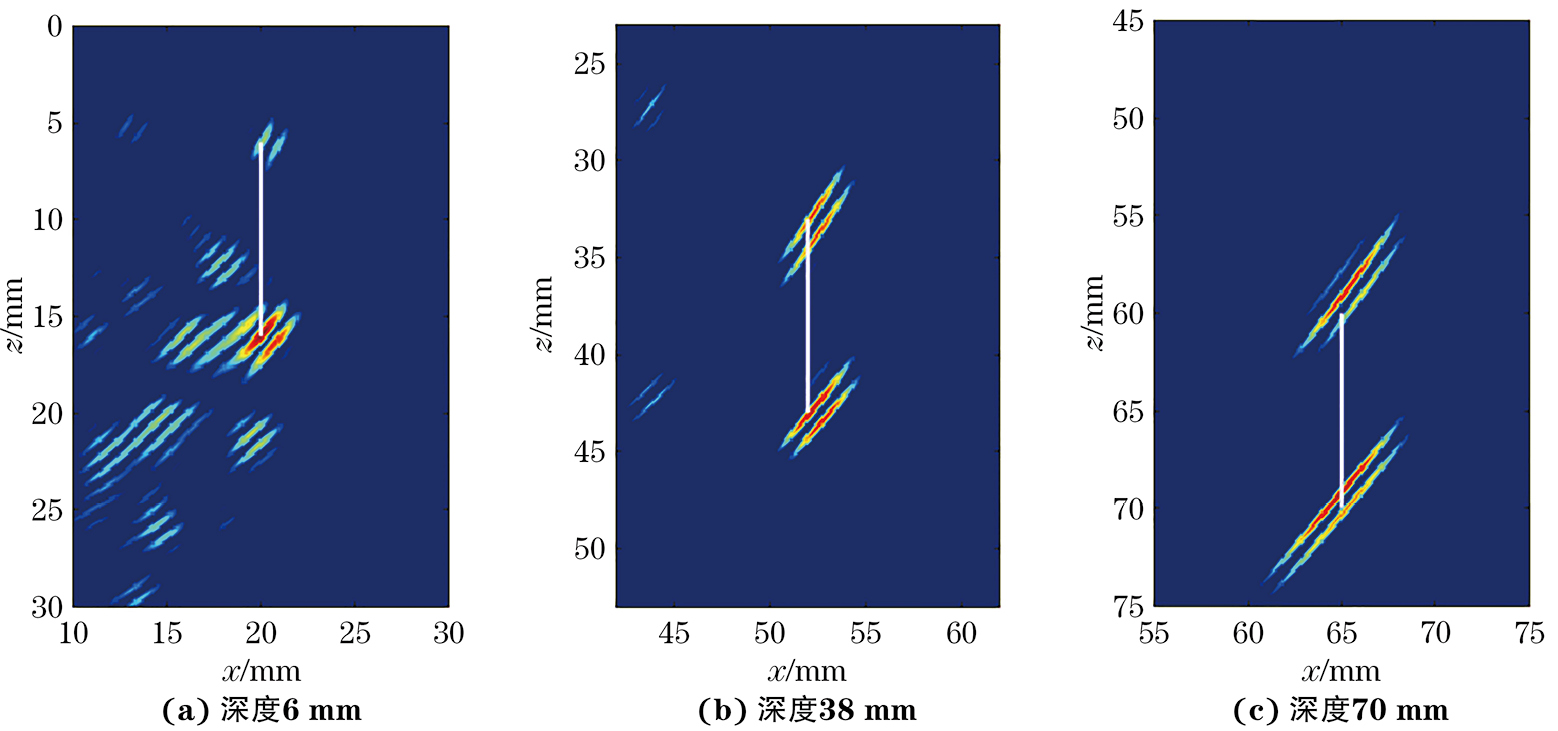
为分析不同位置裂纹缺陷的全聚焦成像检测能力,在厚度为76 mm的奥氏体不锈钢焊缝仿真模型中分别设置深度为10,38,60 mm的裂纹缺陷,其长度均为10 mm,并通过对比不同模式的全聚焦成像结果,分析成像模式对成像效果的影响。不同深度下,长度为10 mm裂纹缺陷的全聚焦直接模式成像结果如图9所示。
由图9可知,长度为10 mm的裂纹缺陷在直接模式全聚焦成像中清晰可见,且缺陷所在位置能够被表征,相比相控阵超声扇形扫查成像,全聚焦成像更容易判断缺陷的数量和位置,利于定量分析。由于发射的超声声束脉冲为多周期高斯脉冲,存在数个波峰,因此在裂纹的全聚焦成像中,可以观察到裂纹缺陷附近存在2~3个条状像,与多个平行小裂纹的成像结果类似。在实际检测中,多个小裂纹缺陷和一个大裂纹缺陷对焊缝力学性能的影响往往并不相同,因此需要对缺陷的数量和尺寸进行确认。这可以通过调整探头位置改变声束入射角度来确认,若为一个大尺寸裂纹,则裂纹中部的反射成像可能会由于角度改变而无法成像,仅剩余裂纹缺陷两个尖端衍射波保持在空间绝对位置内不变,其他成像会改变位置或变弱消失;若为多个平行小裂纹,则会剩余多个尖端衍射波保持在空间绝对位置内不动。从图9中可以观察到,随着裂纹缺陷尺寸增加,缺陷的全聚焦直接成像越来越趋近下尖端一侧,而上尖端一侧成像强度较弱,经过全聚焦平均化后未能显现,而导致定位时误差增大。
为进一步对裂纹缺陷的全聚焦成像结果进行定量分析,整理长度为10 mm裂纹缺陷的全聚焦成像定位和尺寸定量误差,结果如表6所示。
| 序号 | 深度 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|
| 1 | 10 | 9.76 | 0.24 | 2.84 |
| 2 | 38 | 9.88 | 0.12 | 1.46 |
| 3 | 60 | 12.07 | 2.07 | 1.41 |
由表6可知,长度为10 mm裂纹缺陷的平均定位误差为1.90 mm,定位误差较小,全聚焦基本可以表征裂纹缺陷在焊缝中的位置;缺陷平均尺寸定量误差为0.81 mm,裂纹缺陷成像的幅值最高处趋向于裂纹的下尖端,这主要是空间中声波能量分布不均匀导致的,尽管全聚焦成像方法能够在一定程度上增加空间平均性,但是能量的不均匀仍能从全聚焦图像中观察到,这也导致利用裂纹缺陷中心进行定位测量时,定位误差会在一定程度上增大。同时,受到奥氏体不锈钢焊缝各向异性的影响,超声波声束会出现发散,导致裂纹缺陷的反射回波边缘呈现发散的现象,在一定程度上弥补了空间不均匀导致裂纹尺寸定量偏小的不足。
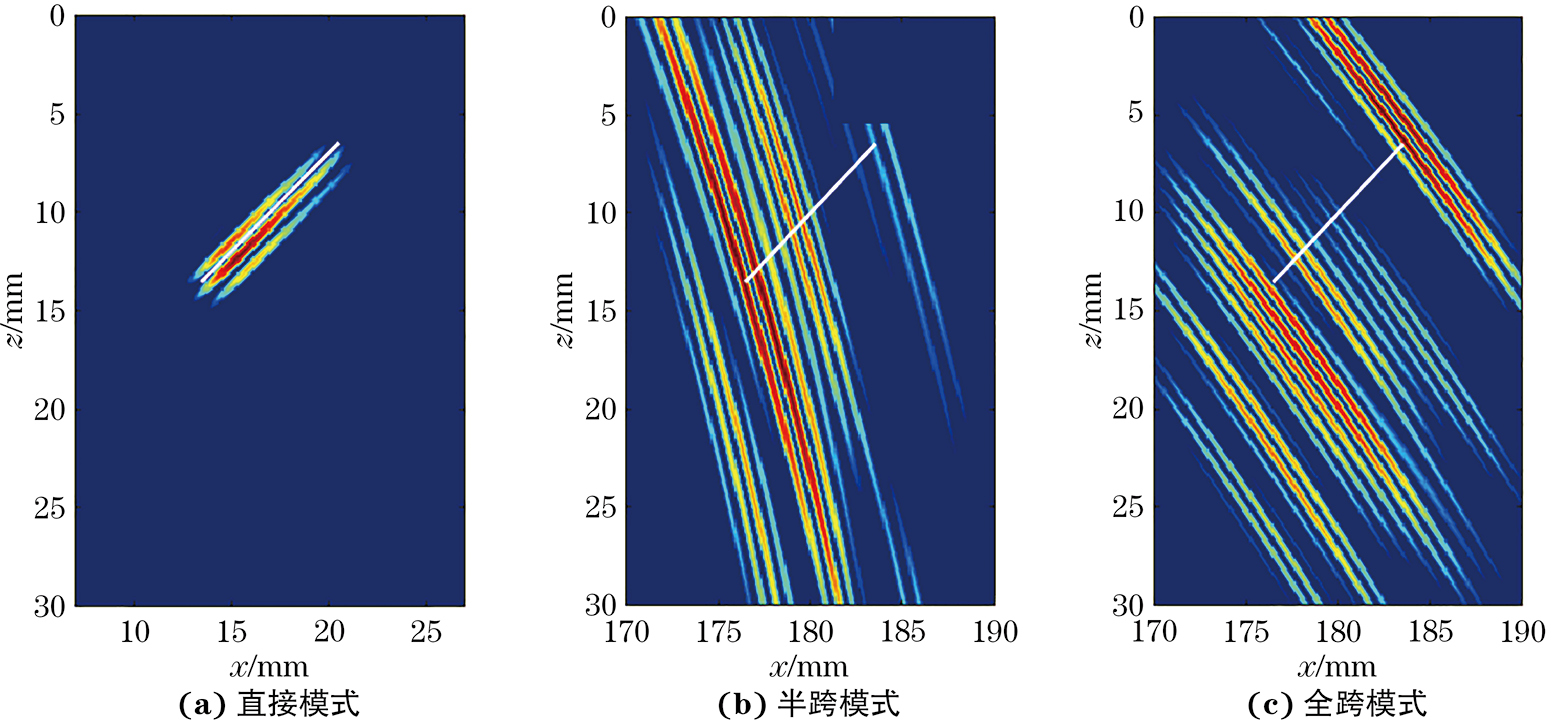
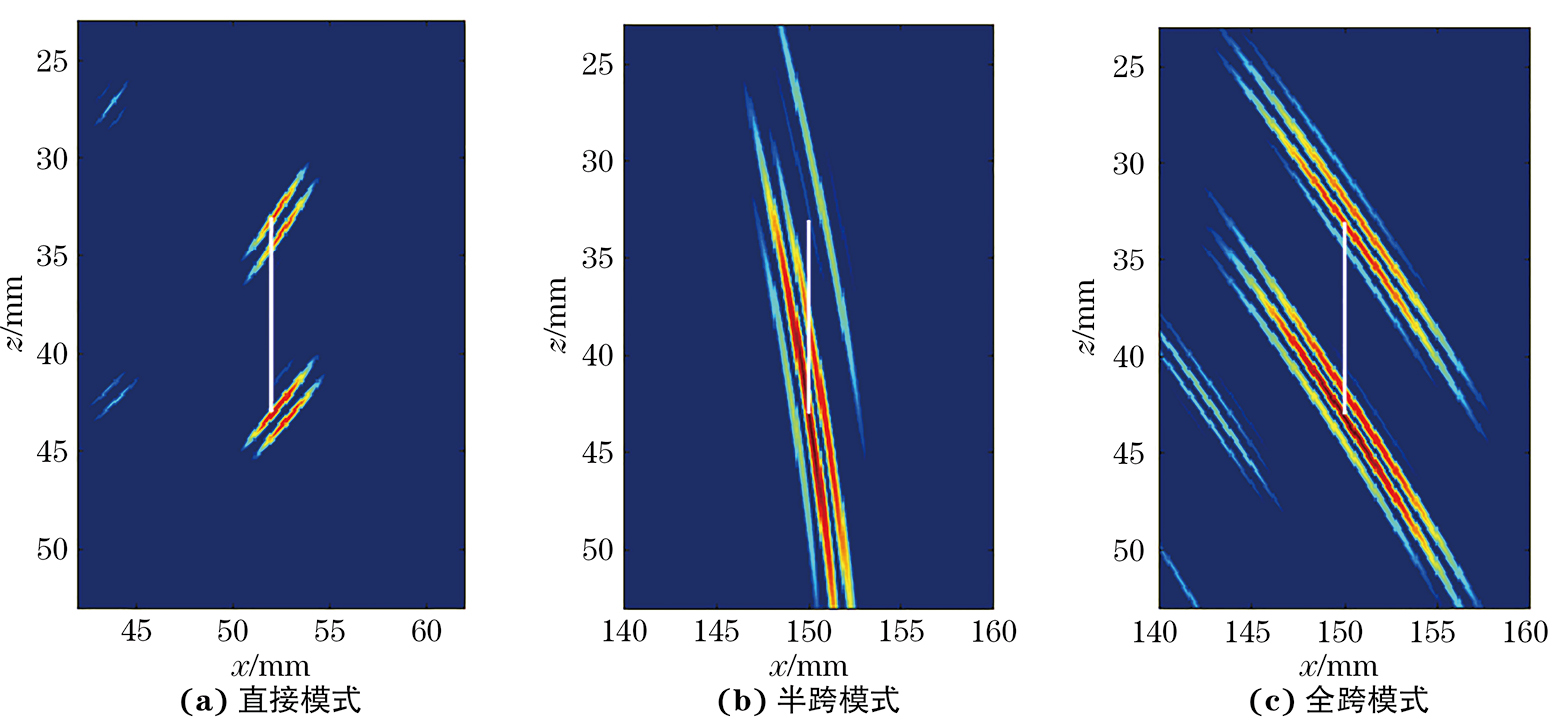
为了比较不同全聚焦成像模式对不同深度裂纹缺陷成像结果的影响,选取不同深度下长度为10 mm的裂纹缺陷进行试验,其直接模式、半跨模式和全跨模式成像结果对比如图10至图12所示。
由图10至图12可知,直接模式、半跨模式和全跨模式的成像方式不同,直接模式下,超声波声束传播方向近似与裂纹取向垂直,因此其成像主要为裂纹的主体部分;而半跨和全跨模式下,超声波传播方向与裂纹取向呈较小的角度,因此其成像主要为裂纹的上下尖端部分。由于超声波传播距离过大,受材料噪声影响,伪像较强,且会一定程度影响裂纹的判断,但基本能够观察到裂纹尖端衍射波的存在。同时可知,3种模式下的成像都可以较好地表征不同深度裂纹缺陷所在的位置。
为进一步说明3种成像模式对不同深度裂纹缺陷的检测能力,整理不同深度下长度为10 mm裂纹缺陷的不同全聚焦成像模式下的定位和尺寸定量误差,结果如表7所示。
| 序号 | 深度 | 成像模式 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|---|
| 1 | 10 | 直接 | 9.76 | 0.24 | 2.84 |
| 2 | 半跨 | 10.65 | 0.65 | 0.72 | |
| 3 | 全跨 | 12.33 | 2.33 | 2.04 | |
| 4 | 38 | 直接 | 9.88 | 0.12 | 1.46 |
| 5 | 半跨 | 10.57 | 0.57 | 1.52 | |
| 6 | 全跨 | 9.06 | 0.94 | 3.61 | |
| 7 | 60 | 直接 | 12.07 | 2.07 | 1.41 |
| 8 | 半跨 | 18.03 | 8.03 | 5.00 | |
| 9 | 全跨 | 16.83 | 6.83 | 7.02 |
由表7可知,对于深度为10 mm的裂纹,半跨模式的定位误差和尺寸定量误差均小于直接成像模式和全跨模式的,这主要是由于在此裂纹所处的角度下,半跨模式和全跨模式成像显示的为裂纹缺陷上、下尖端的衍射波,且半跨模式比全跨模式的声程更小,受奥氏体不锈钢焊缝各向异性的影响更小,因此成像效果更好。对于深度为38 mm的裂纹,直接模式的定位误差和尺寸定量误差均小于半跨模式和全跨模式的,这主要是由于在此裂纹所处的角度下,半跨模式和全跨模式成像显示的为裂纹缺陷上、下尖端的衍射波,但是受奥氏体不锈钢焊缝各向异性的影响,定位误差和尺寸定量误差增大。但是3种成像模式的误差差距较小,根据裂纹角度的不同,成像误差也会相应变化,因此在检测中可以通过变换成像模式以降低检测误差。对于深度为60 mm的裂纹,直接模式的定位误差和尺寸定量误差均小于半跨模式和全跨模式的,这主要是由于在此裂纹所处的角度下,半跨模式和全跨模式成像显示的为裂纹缺陷上、下尖端的衍射波,同时裂纹缺陷位于焊缝近底面,半跨模式和全跨模式下缺陷回波与底面回波混叠,增大了定位误差和尺寸定量误差。故检测近底面裂纹缺陷时,应优先选择直接成像模式。
综上所述,裂纹缺陷位于焊缝近底面和中部时,可以综合直接成像模式和半跨模式进行检测;当裂纹位于焊缝近底面时,优先选择直接成像模式。
为分析不同位置侧壁未熔合缺陷的全聚焦成像检测能力,在厚度为76 mm,长度为10 mm的奥氏体不锈钢焊缝仿真模型中分别设置深度为6,38,70 mm的侧壁未熔合缺陷,并通过对比不同模式的全聚焦成像结果,分析成像模式对成像效果的影响。其直接模式成像结果如图13所示。
由图13可知,深度为6 mm时,长度为10 mm侧壁未熔合缺陷的上、下尖端在直接模式全聚焦成像中清晰可见,且缺陷所在位置能够被表征,相比相控阵超声扇形扫查成像,全聚焦成像更容易判断缺陷的数量和位置,利于定量分析。从图13中可以观察到,在深度为6 mm位置侧壁未熔合缺陷下尖端附近存在一些伪像,这主要有以下两个原因:一是结构噪声引起的背景噪声,形成了伪像;二是侧壁未熔合缺陷呈条形,超声声束传播至缺陷处时,除了在缺陷尖端产生衍射波外,还会产生折射和反射现象,一部分反射波由探头接收,从而形成伪像。通过改变探头位置实施多次检测,可以降低伪像对缺陷判断的影响。
为进一步对不同深度侧壁未熔合缺陷的全聚焦成像结果进行定量分析,整理不同深度侧壁未熔合缺陷的全聚焦成像定位和尺寸定量误差,结果如表8所示。
| 序号 | 深度 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|
| 1 | 6 | 10.12 | 0.12 | 0.39 |
| 2 | 38 | 9.90 | 0.10 | 0.50 |
| 3 | 70 | 10.30 | 0.30 | 1.07 |
由表8可知,不同深度侧壁未熔合缺陷平均定位误差为0.65 mm,定位误差较小,全聚焦成像基本可以表征侧壁未熔合缺陷在焊缝中的位置;不同深度侧壁未熔合缺陷平均尺寸定量误差为0.17 mm,全聚焦成像对不同深度侧壁未熔合缺陷上、下尖端的定位较为准确,且能够较为准确地估计侧壁未熔合缺陷的尺寸,且随着深度增加,尺寸定量误差和定位误差在一定范围内波动,较为稳定。
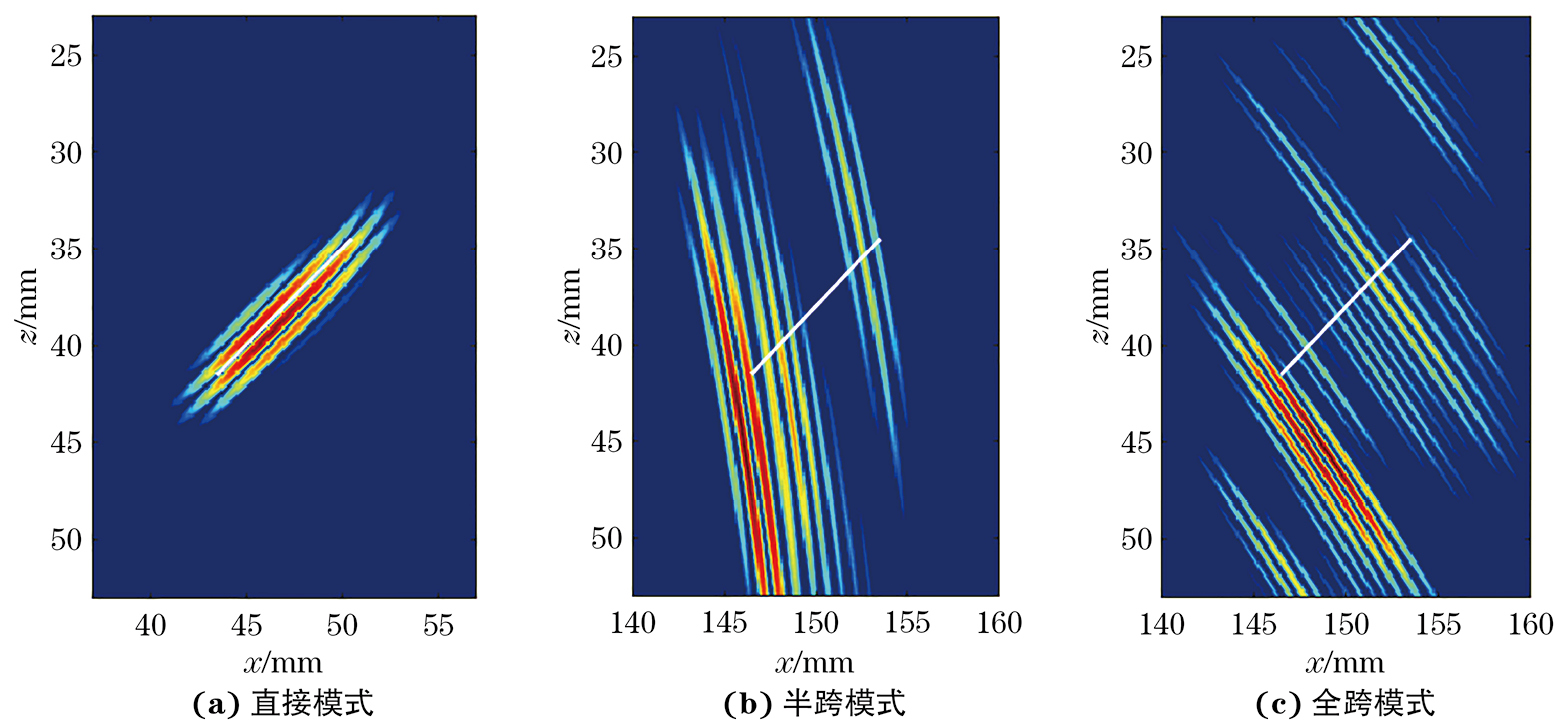
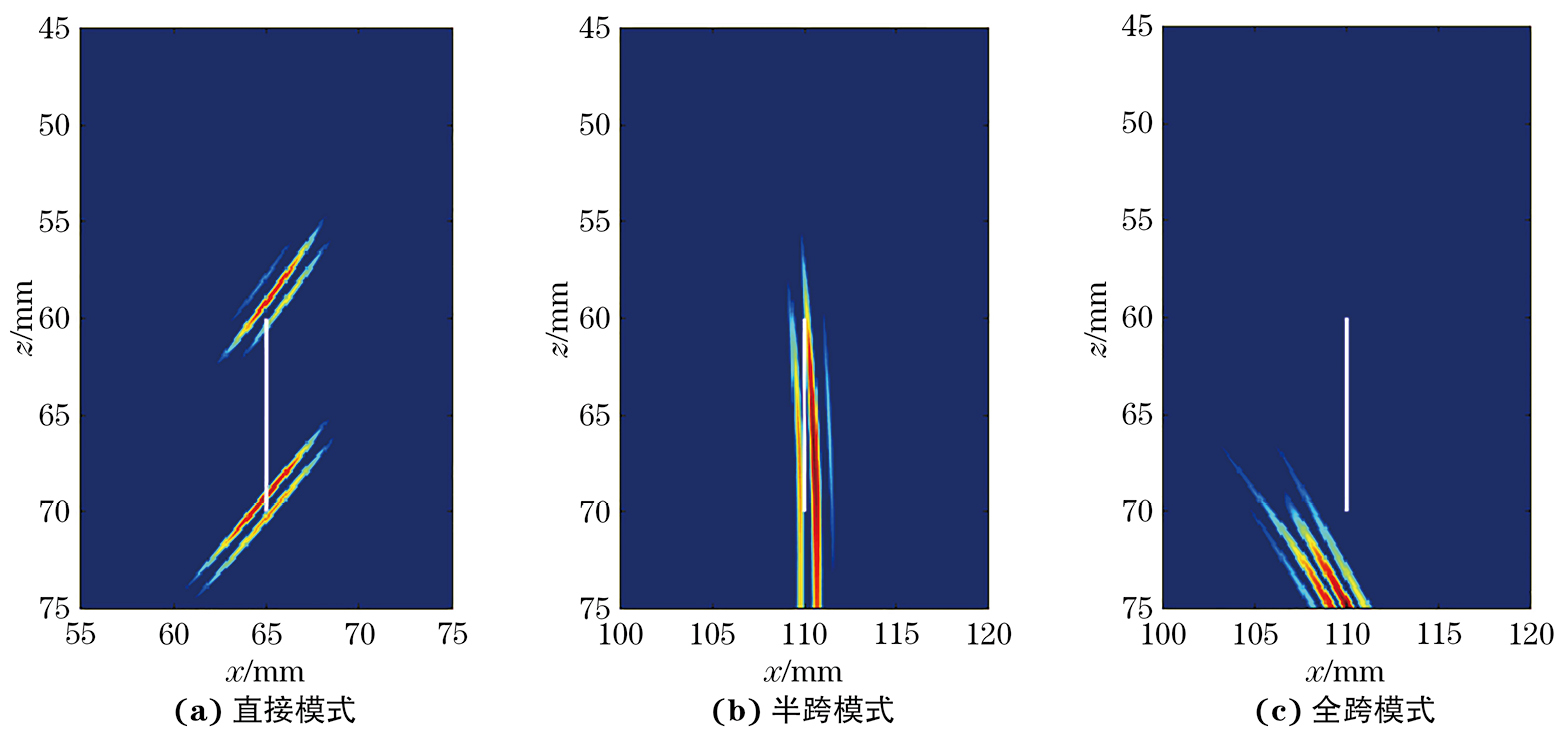
为了比较不同全聚焦成像模式对不同深度侧壁未熔合缺陷成像结果的影响,选取不同深度,长度为10 mm的侧壁未熔合缺陷进行试验,其直接模式、半跨模式和全跨模式成像结果对比如图14至图16所示。
由图14至图16可知,对于深度分别为6,38,70 mm的侧壁未熔合缺陷,直接模式、半跨模式和全跨模式下的成像都可以较好地表征缺陷所在位置。
为进一步说明3种成像模式对侧壁未熔合缺陷的检测能力,整理不同深度下,长度为10 mm侧壁未熔合缺陷的不同全聚焦成像模式下的定位和尺寸定量误差,结果如表9所示。
| 序号 | 深度 | 成像模式 | 尺寸定量 | 尺寸定量误差 | 定位误差 |
|---|---|---|---|---|---|
| 1 | 6 | 直接 | 10.12 | 0.12 | 0.39 |
| 2 | 半跨 | 9.20 | 0.80 | 0.55 | |
| 3 | 全跨 | 10.10 | 0.10 | 0.21 | |
| 4 | 38 | 直接 | 9.90 | 0.10 | 0.50 |
| 5 | 半跨 | 11.05 | 1.05 | 0.64 | |
| 6 | 全跨 | 10.40 | 0.40 | 0.72 | |
| 7 | 70 | 直接 | 10.30 | 0.30 | 1.07 |
| 8 | 半跨 | 17.53 | 7.53 | 3.78 | |
| 9 | 全跨 | 9.54 | 0.46 | 9.80 |
由表9可知,对于深度为6,38 mm的侧壁未熔合缺陷,半跨模式的误差比其他两种方法的误差稍大,且成像中侧壁未熔合缺陷的上、下尖端衍射波发散严重,不建议采用。因此,在检测近表面和中部侧壁未熔合缺陷时,可综合考虑直接模式和全跨模式。对于深度为70 mm的侧壁未熔合缺陷,直接模式的定位误差和尺寸定量误差均小于半跨模式和全跨模式的,半跨模式和全跨模式下探头接收声波的角度偏离实际声波的反射角度,导致超声成像产生发散和存在背景噪声的现象,而使得底面回波和缺陷回波发生混叠,也就增大了误差和缺陷分析难度。因此,在检测近底面侧壁未熔合缺陷时,应优先考虑直接模式成像。
综上所述,当侧壁未熔合缺陷处于焊缝近表面和焊缝中部时,推荐以直接成像模式成像为主,结合全跨模式成像,以提高缺陷分析的精度;当侧壁未熔合缺陷位于焊缝近底面时,应使用直接模式成像。
文章针对厚壁奥氏体不锈钢焊缝TRL面阵探头全聚焦检测的成像模式进行了仿真与分析,得出如下结论。
(1)采用TRL面阵探头对厚壁奥氏体不锈钢焊缝进行全聚焦检测,可有效检出焊缝中的气孔、裂纹、侧壁未熔合等缺陷。
(2)针对焊缝中不同类型和位置的缺陷,可采用不同成像模式来提高定位与定量精度。
(3)焊缝中同为体积型或面积型的其他类型缺陷,其检出效果和定位定量效果与上述结论一致。
(4)试验结果可为厚壁奥氏体不锈钢焊缝的全聚焦成像检测工艺的制定提供参考。
文章来源——材料与测试网
浙江国检检测技术股份有限公司 版权所有 【暂无】 百度统计
全国统一服务热线:400-1188-260
客服手机号:13372307781
电话:400 1188 260 质量投诉 +86-573-86161208
邮箱:shhgj@chinazbj.com
地址:浙江省嘉兴市海盐县武原街道丰潭路777号
备案号:浙ICP备05056915号
 浙公网安备 33042402000106号
浙公网安备 33042402000106号
技术支持:追马网
 客服微信号
客服微信号
 微信公众号
微信公众号