图 1 凝汽器管口区域结构示意

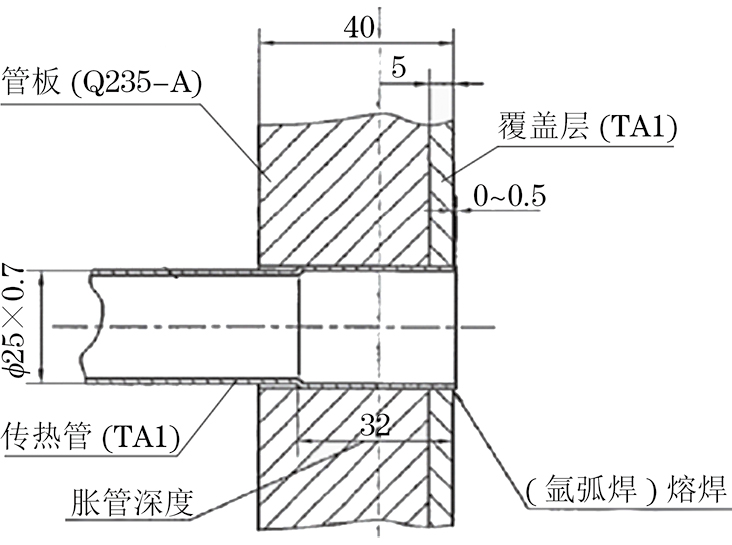
凝汽器作为核电厂常规岛的重要组成部分,其安全可靠性直接影响到机组的安全稳定运行。而传热管作为凝汽器的主要换热组件,是凝汽器最重要的部分。传热管材料为钛合金,传热管管口与管板之间采用“胀管+密封焊”的形式连接,其结构示意如图1所示。
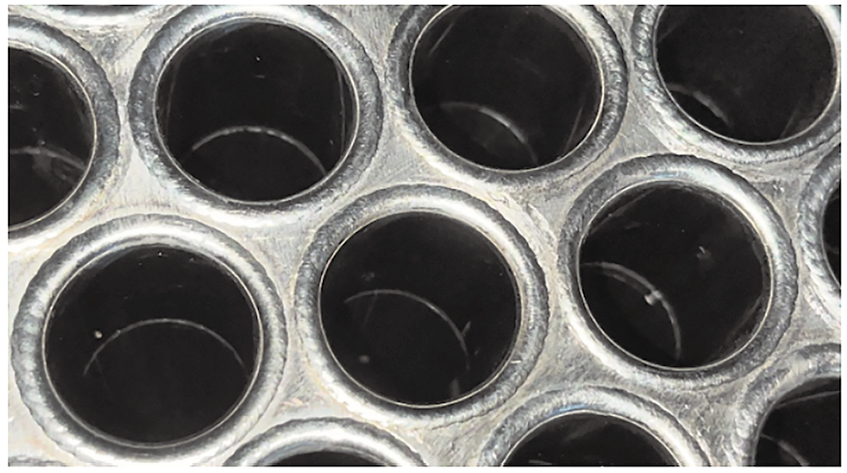
目前,主要采用Bobbin探头对凝汽器传热管进行涡流检测,在近管口区域受胀管过渡段及管板边缘的影响,该区域(整个管板区域+管板内边缘往内部10 mm)为检测盲区[1],在役检查阶段往往需要对近管口区域补充进行目视检测。某电厂大修期间,目视检测发现接排出水侧近管口区域存在大量划伤,如图2所示。划伤距管口约30 mm,该位置属于管板区域,使用Bobbin探头进行涡流检测时,未发现异常信号显示。同时,由于该划伤位于传热管内壁,且划伤较细(长度小于0.5 mm),采用传统测量方法无法确定该缺陷的深度。
为解决该缺陷的检出问题,并给出半定量的检测方案,可采用的涡流检测技术有MRPC、管阵列、表面阵列等。考虑到该缺陷属于表面开口缺陷且位于管板区域,为尽量降低结构信号的影响,拟采用更高频的表面阵列涡流检测技术实施检测[2],并通过试验验证其检测能力。
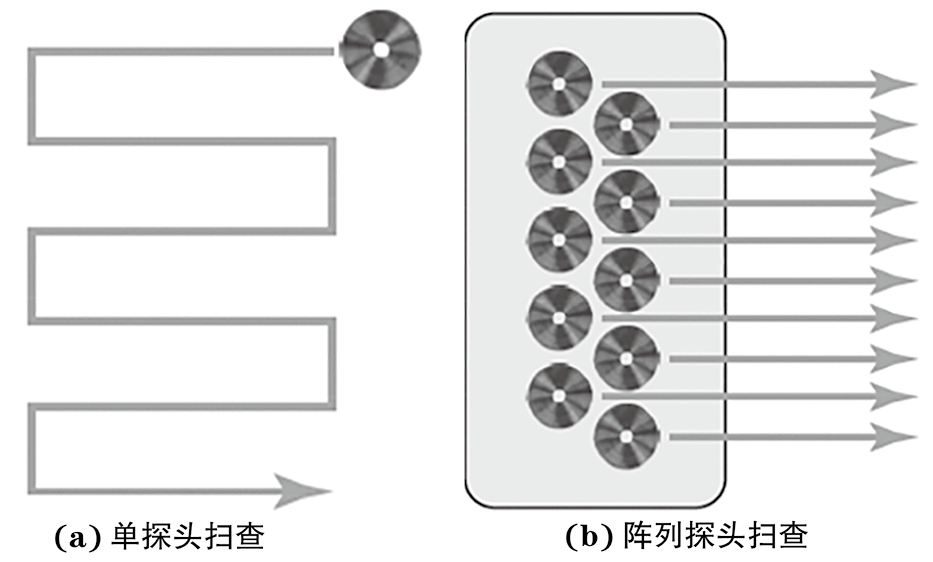
阵列涡流检测基于常规的涡流检测技术,主要通过设计合理的传感器结构使涡流探头阵列化,并利用数字信号处理技术和计算机技术完成信号的激励、运放、采集、调理、显示等功能,从而实现快速、高效的数字化检测。与传统单探头涡流检测相比,阵列涡流检测采用电子学技术,对传感器单元进行分时切换,通过单次扫查就能达到传统单探头涡流检测多次扫查的检测效果。传统涡流单探头扫查与阵列涡流探头扫查原理示意如图3所示。
表面阵列涡流检测技术是阵列涡流技术在表面检查中的特殊应用,其主要特点是检验频率较常规阵列涡流技术的高。阵列线圈部分由多组按照一定方式排布的T/R(发射/接收)线圈组成[3]。目前的表面阵列涡流探头多采用双排线圈结构,其中一排线圈与另一排线圈在周向错开一个线圈半径的距离,如图4所示。
试验采用ZETEC生产的Miz-200A型涡流检测仪(见图5)。选用SURFXTS0023型柔性薄片式表面阵列探头(见图6),其长度为56 mm,线圈排列形式为2×16(列×行),中心频率为1 MHz~4 MHz。
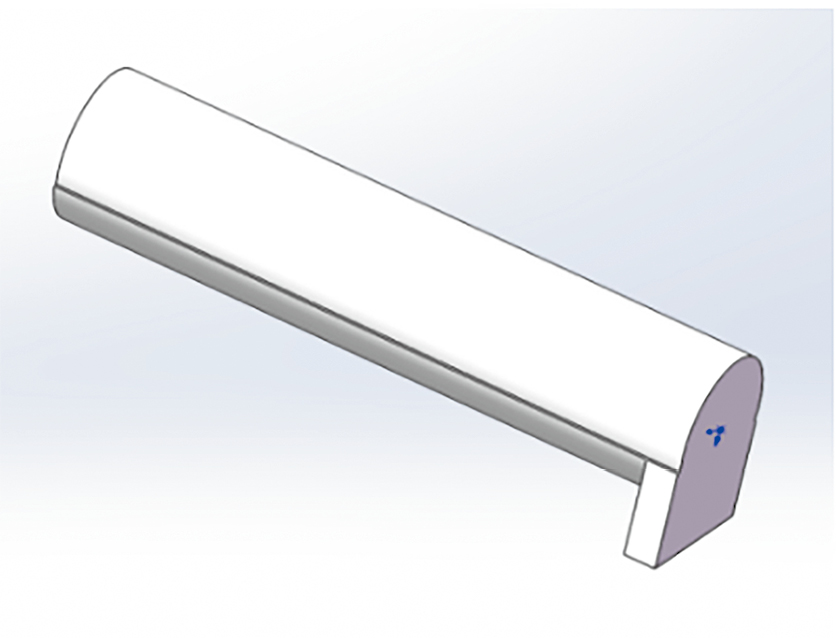
柔性表面阵列探头结构的局限性,导致其稳定性以及与被检工件的贴合性较差,故试验设计了一款辅助工装(见图7),以使探头能够较大程度地贴合被检工件,提高检测稳定性及灵敏度,并在探头表面加装了一层保护膜,以免探头受损。
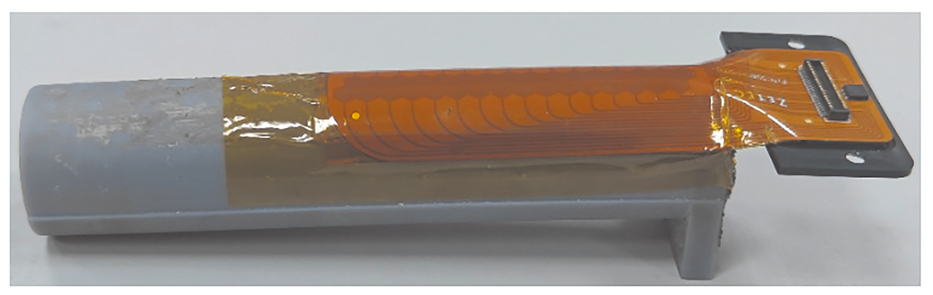
使用时,将探头的长轴与辅助工装的长轴对齐,同时将探头的短轴中心线与工装手柄端圆弧中心线对齐,并使用耐高温耐磨的胶带将探头固定在工装上。探头和工装的组合示意如图8所示。
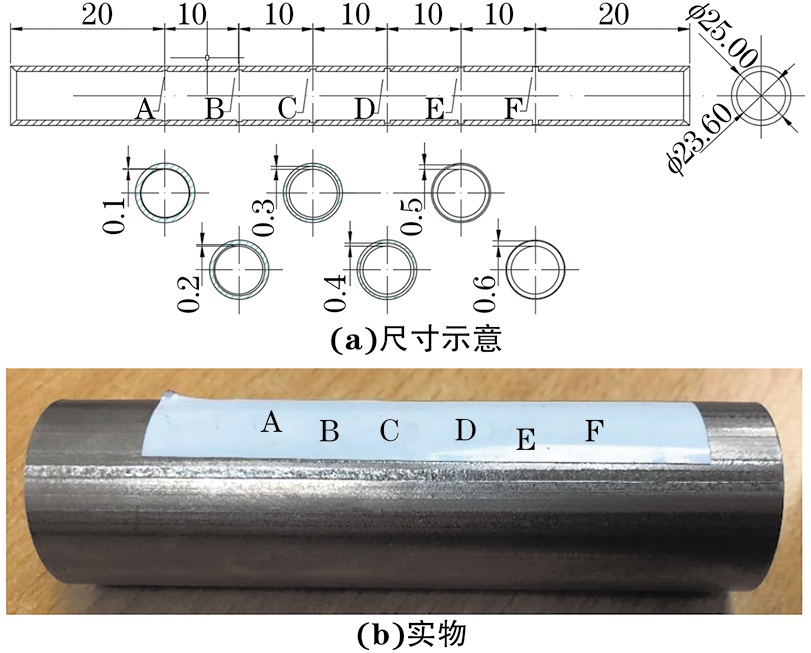
参考划伤的型式,在对比试件上设计了6个长度为10 mm,深度不同的周向线性槽。对比试件人工缺陷参数如表1所示(传热管壁厚为0.7 mm),尺寸示意及实物如图9所示。
| 编号 | 类型 | 深度/mm | 伤深占壁厚的百分比/% | 宽度/mm |
|---|---|---|---|---|
| A | 周向线性槽 | 0.1 | 14.3 | 0.13 |
| B | 周向线性槽 | 0.2 | 28.6 | 0.13 |
| C | 周向线性槽 | 0.3 | 42.9 | 0.13 |
| D | 周向线性槽 | 0.4 | 57.1 | 0.13 |
| E | 周向线性槽 | 0.5 | 71.4 | 0.13 |
| F | 周向线性槽 | 0.6 | 85.9 | 0.13 |
(1)检测频率
涡流标准渗透深度δ可用公式
(2)检测要求
在被检件上的扫查速度不得超过在对比试件上校准时的扫查速度,信噪比大于3,数字化率应不小于每毫米2个点。
(3)扫查方式
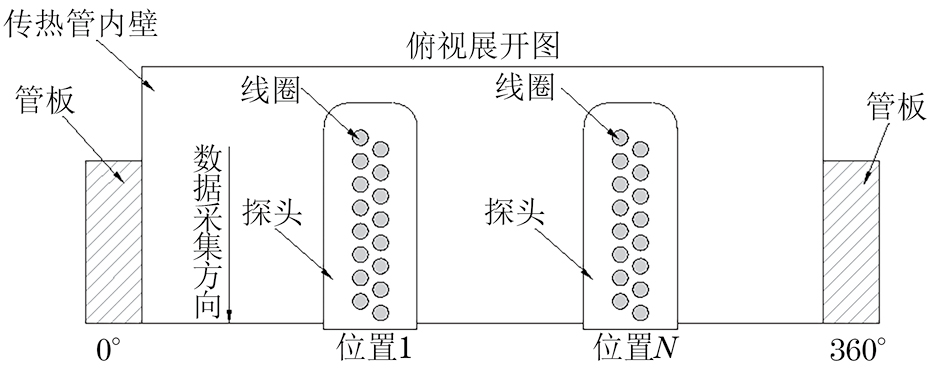
扫查速度不应超过200 mm/s,施加在探头上的压力应足以保持其与被检件的接触。扫查时,将探头伸入管内,再沿管内拉出并进行数据采集;周向旋转一定角度后,再次重复之前的探头伸入、拉出采集操作,直至覆盖周向360°。相邻两次扫查时的探头覆盖率应不小于50%。探头扫查示意如图10所示。
(4)对比试件的校准
对对比试件上的人工缺陷进行数据采集,观察各轴向通道,选取深度为0.1 mm的线性槽的最大幅值信号,定义为0.5 V,相位调整至90°,并归一化至其他轴向通道。对比试件人工缺陷的信号响应参数如表2所示(幅值测量方式为VMx,下同),信号响应图谱如图11所示。
| 编号 | 伤深占壁厚的百分比/% | 最大幅值/V | 说明 |
|---|---|---|---|
| A | 14.3 | 0.50 | 标定 |
| B | 28.6 | 0.85 | — |
| C | 42.9 | 1.42 | — |
| D | 57.1 | 1.98 | — |
| E | 71.4 | 2.48 | — |
| F | 85.9 | 3.19 | — |
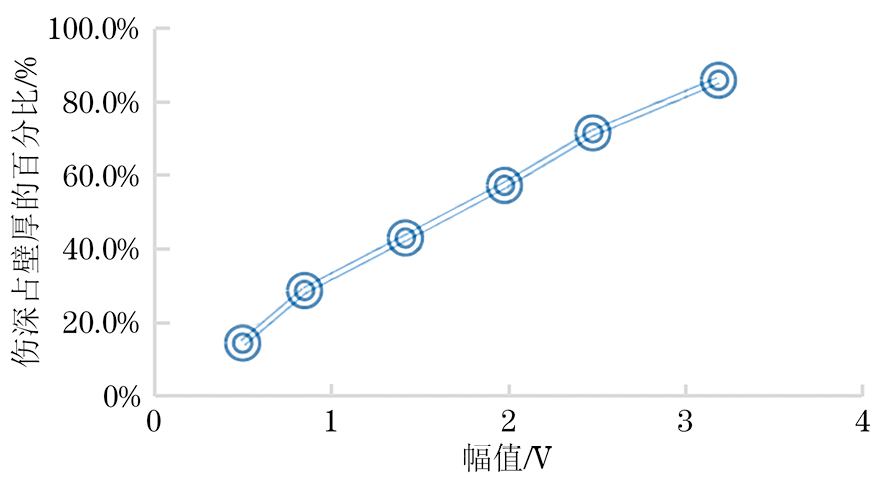
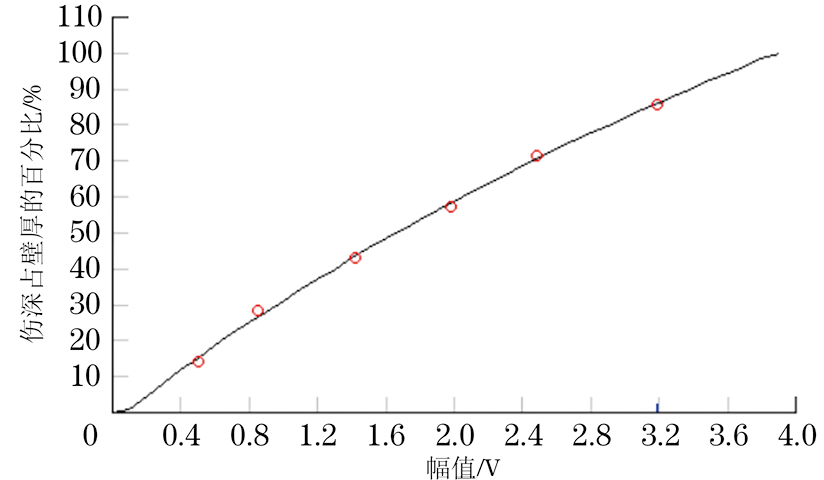
根据对比试件上不同深度的人工缺陷信号响应情况,绘制了幅值与伤深的关系曲线,如图12所示。由图12可知,随着缺陷深度增加,信号幅值逐渐增大,且存在一定的比例关系。因此,可以通过涡流软件对幅值和伤深进行曲线拟合,用于后续缺陷伤深的判定,通过涡流软件拟合后得到的幅值-伤深曲线如图13所示。
(5)检测重复性试验
由于该工装为手持式,故需要验证其检测重复性。验证时,采用上述工艺对同一缺陷(对比试件上0.1 mm深的周向线性槽)采集16次数据,每次采集后的幅值响应如表3所示。
| 次数 | 最大幅值 | 次数 | 最大幅值 |
|---|---|---|---|
| 1 | 0.51 | 9 | 0.52 |
| 2 | 0.71 | 10 | 0.51 |
| 3 | 0.56 | 11 | 0.62 |
| 4 | 0.63 | 12 | 0.54 |
| 5 | 0.54 | 13 | 0.55 |
| 6 | 0.57 | 14 | 0.56 |
| 7 | 0.52 | 15 | 0.52 |
| 8 | 0.52 | 16 | 0.53 |
由表3可知,大部分情况下检测重复性良好,仅有2~3次偏差较大(2,4,11次),后续检测过程中,可通过采取多次重复采集、选取重复出现的幅值进行记录的方式,减小人为因素导致的结果不准确性。
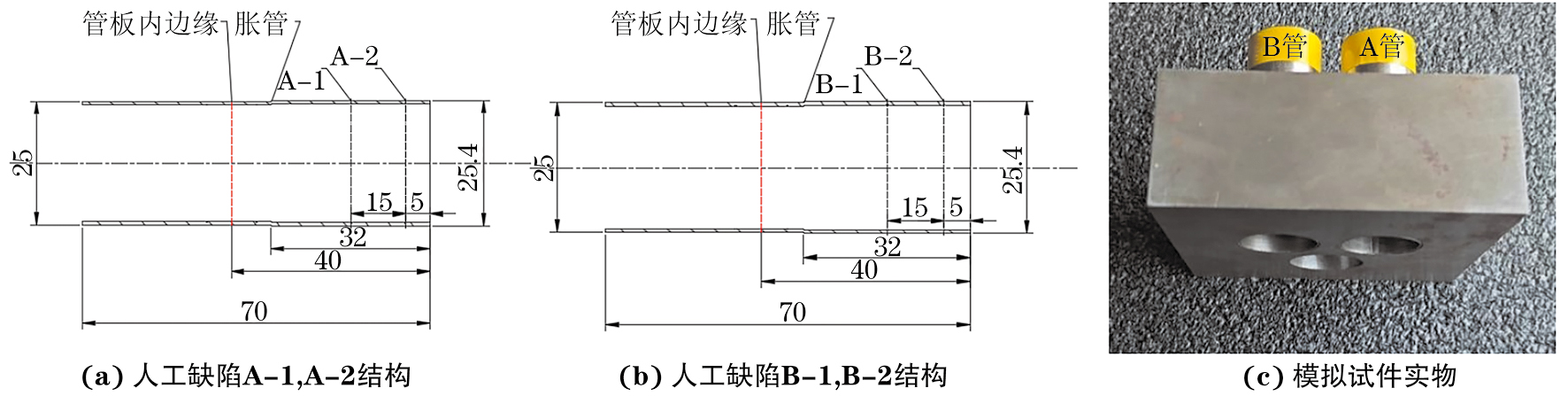
为验证上述工艺对凝汽器近管口区域划伤缺陷的检测效果,设计加工了模拟试件进行试验验证。模拟试件由管板与带人工缺陷的传热管胀接而成,人工缺陷相关参数如表4所示,人工缺陷结构示意及模拟试件实物如图14所示。
| 人工缺陷编号 | 人工缺陷类型 | 伤深 | 宽度 |
|---|---|---|---|
| A-1 | 内环槽 | 0.1 | 0.13 |
| A-2 | 内环槽 | 0.1 | 0.13 |
| B-1 | 内环槽 | 0.2 | 0.13 |
| B-2 | 内环槽 | 0.2 | 0.13 |
对模拟试件上的人工缺陷进行数据采集和分析,并记录人工缺陷信号响应信息,响应参数如表5所示,信号响应图谱如图15所示。由图15可知,所有人工缺陷均能有效检出,同时根据图13所示的曲线可给出缺陷深度当量,伤深最大偏差为6.6%。
| 人工缺陷编号 | 伤深百分比/% | 最大幅值/V | 估算伤深百分比/% | 偏差/% |
|---|---|---|---|---|
| A-1 | 14.3 | 0.51 | 16 | −1.7 |
| A-2 | 14.3 | 0.58 | 18 | −3.7 |
| B-1 | 28.6 | 0.88 | 28 | 0.6 |
| B-2 | 28.6 | 0.70 | 22 | 6.6 |
涡流的端部效应会使得表面阵列探头存在盲区,其大小与检测频率、探头线圈尺寸以及与端部的距离有关。由模拟试验可知,距离端部5 mm的0.1 mm深的线性槽能够有效检出,因此该表面阵列技术的盲区不大于5 mm。
某次大修期间,挑选了一些近管口区域存在划伤的传热管进行现场试验,使用加工的工装搭载柔性表面阵列探头,采用文章工艺参数进行检测,检测结果如图16所示。
根据幅值-伤深曲线可知,C1R040005幅值为0.7 V,伤深百分比为22%;C2R002012幅值为1.18 V,伤深百分比为37%。经设备工程师评估,确定后续需对其进行跟踪检测。
(1)文章工艺至少能够检出凝汽器近管口区域深度为0.1 mm、宽度为0.13 mm的表面开口缺陷。
(2)由模拟试验结果可知,该表面阵列技术的盲区不大于5 mm。
(3)信号幅值与伤深存在一定的线性关系,幅值大小可以在一定程度上用于评判缺陷伤深,进而为缺陷评估和处理提供参考依据。
(4)探头工装能够有效提高检测稳定性,但仍为手持式,且需多次扫查才能保证覆盖率及准确性,故检测效率低。
文章来源——材料与测试网
浙江国检检测技术股份有限公司 版权所有 【暂无】 百度统计
全国统一服务热线:400-1188-260
客服手机号:13372307781
电话:400 1188 260 质量投诉 +86-573-86161208
邮箱:shhgj@chinazbj.com
地址:浙江省嘉兴市海盐县武原街道丰潭路777号
备案号:浙ICP备05056915号
 浙公网安备 33042402000106号
浙公网安备 33042402000106号
技术支持:追马网
 客服微信号
客服微信号
 微信公众号
微信公众号