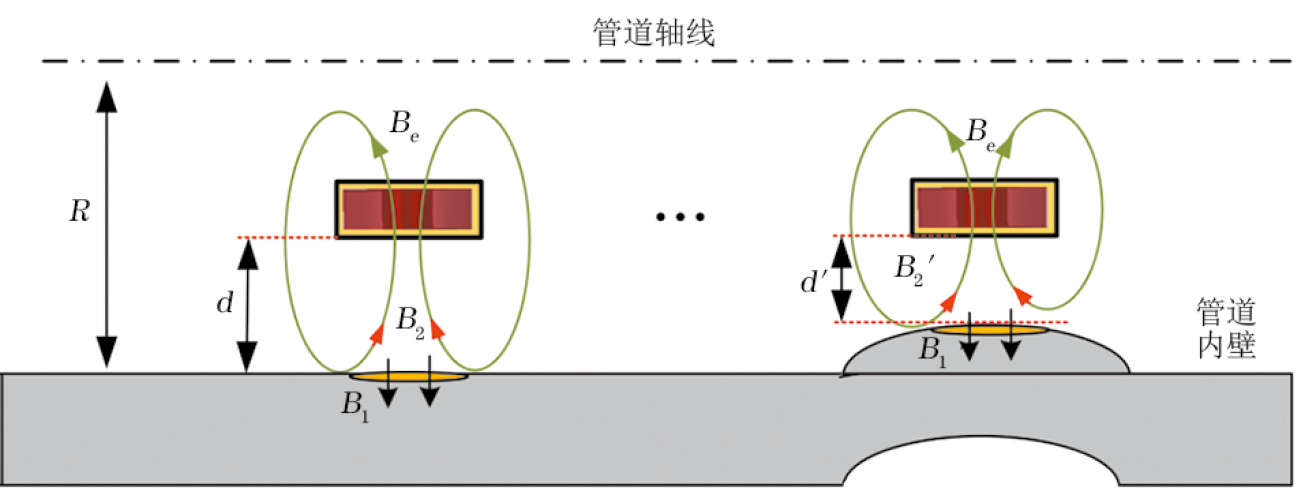
图 1 电磁测距检测原理示意

管道主要用于石油天然气输送,是“国家生命线工程”。据统计,我国的长输管道达到166×103 km。油气介质易燃、易爆、有毒,一旦发生安全事故将直接威胁国家能源和公共安全。定期检验检测是预防事故发生的有效方法,国家质检总局发布的《关于规范和推进油气输送管道法定检验工作的通知》中明确要求:油气长输管线根据服役期不同需在3~5 a的周期内强制进行全面的法定检测检验。当前,管道内检测技术具有高效、连续、不受服役环境限制等优点,是国内外保障和维护管道安全运行的有效手段[1-3]。
近年来,我国企事业单位、高等院校在“国家重点研发计划”、“国家重大仪器专项”等科技项目的支撑下,开展了油气管道的内检测技术研究与装备的攻关。目前成熟应用的管道摆臂、漏磁、涡流等检测设备可以有效检出在役管道的腐蚀、凿痕、变径等安全隐患[4-7]。但部分管道由于服役年限长、工作环境复杂、输送介质杂质多,实施管道内检测时存在巨大的卡堵风险[8]。
近年来,为了实现高越障通过能力下的管道变径缺陷的定位与识别,一些学者开展了相关研究。RAMELLA等[9-10]开发了一种公称直径为300 mm的卡尺式聚氨酯泡沫测径内检测新装备,实现了管体变径和腐蚀缺陷的有效检出,但该接触式检测技术存在内壁划伤和数据失真的潜在风险。熊毅等[11]提出了内嵌悬臂梁式力传感器检测管道大变径的设计方案,以聚氨酯泡沫为载体,通过力传感器记录聚氨酯泡沫受到的挤压力来获取管道变形量。王宇楠等[12]提出利用内嵌磁铁和霍尔元件获取管体变径引起的磁场变化量的设计方案。李晓龙等提出了电磁测距与探臂结合的管道复合变形检测技术,提高了检测器的周向检测精度。
在上述研究基础上,笔者结合传统的电磁测距与泡沫清管两种技术,设计开发了高通过性油气管道变径检测清管器,搭建了三轴动态扫查试验平台,设计制作了模拟的管道变径缺陷试件,完成了集成传感及电子系统的性能测试。
电磁测距检测原理如图1所示,励磁线圈在交变电流信号的激励作用下产生励磁场,磁通密度为Be。当管道不存在缺陷时,试件表面涡流产生的磁场为B1,衍生的磁化磁场强度为B2,空间中的复合磁场强度Bt是此三种磁场的矢量叠加。当管道存在变径缺陷时,管道内壁与励磁线圈间等效距离由d改变为d´,磁化磁场和涡流磁场分别改变为B2´和B1´,空间中的复合磁通叠加信号改变为Bt´,空间磁场信号的畸变量ΔBt是管道变形量的非线性映射。
电磁测距检测探头中的磁传感器可以将空间中的磁场信号转化为电压信号进行传输和存储。具体而言,当被测管道不含变径缺陷时,探头与管壁间的距离为一定值d,传感器输出的电压值为基线值Vline。当内检测器通过管道变形区域时,管壁产生内凹,探头与管壁间的距离变化为d1,输出电压值产生畸变,变化量ΔV携带了管道变形量Δd的信息。
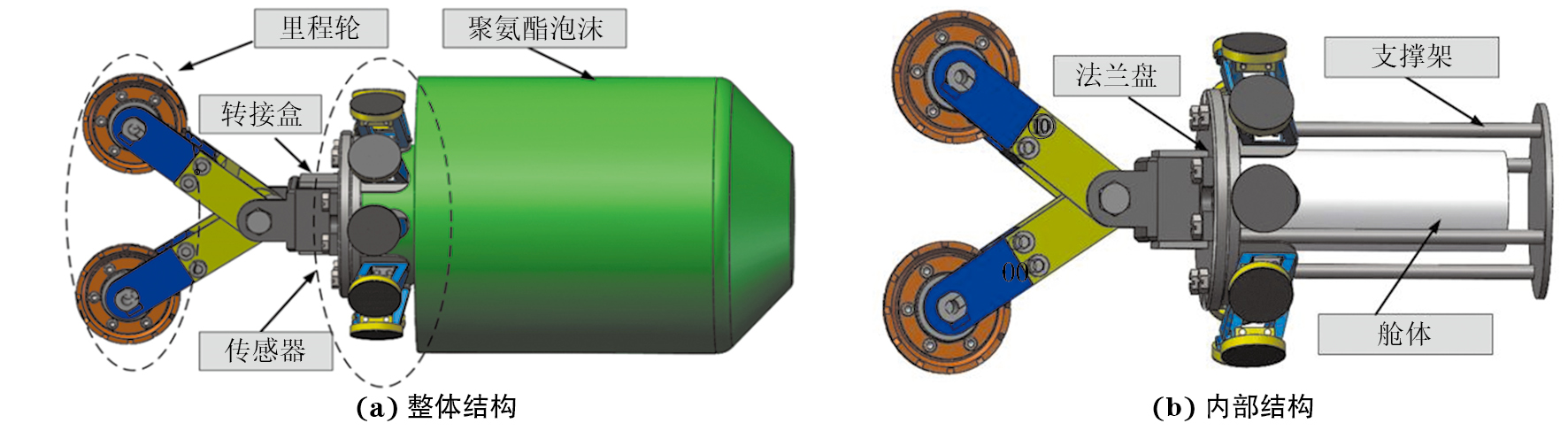
机械式、聚氨酯泡沫式清管器(见图2)具有高通过性的优势,但不具备管道大变径缺陷的检出与定位能力,为此提出如图3所示的高通过性油气管道泡沫变径内检测装备三维结构,主要包含:里程轮、转接盒、阵列布置传感器、聚氨酯泡沫、法兰盘、密封舱体、检测器骨架等。
装备结构中,里程轮由机械结构和里程传感器组成,机械轮滚动带动磁铁转动使磁场产生周期性的变化并被磁性角度传感器捕获,以此来记录内检测器的运行里程。磁性角度传感器采用江苏多维公司研制的TMR3002芯片,双轴输出与磁场角度成正弦和余弦关系的电压信号,输出信号的峰峰值为可供电电压的100%,因此不需增加额外的外部信号放大与处理电路。同时,TMR(隧道磁阻)惠斯通电桥结构有效补偿了传感器的温度漂移,其采用LGA8封装形式,尺寸仅为3.0 mm×3.0 mm×0.75 mm(长×宽×高),满足清管器在管道高速运行时的高精度里程记录需求。
转接盒包括转接电路及机械外壳,负责将阵列传感系统感知的管道缺陷信息汇总并输入至机芯进行采集和存储;阵列布置的传感器可以实时记录管道的真实变径量并转换成模拟信号进行传输;聚氨酯泡沫具有抗拉强度高、可压缩、耐磨、耐油等特点,在提供内检测器驱动力的同时,具有较高的变径通过能力;法兰盘可以对检测器的舱体进行密封,为电子系统及电源提供保护;密封舱体为电子系统和电源提供刚性支撑;检测器骨架可以将电子系统及机械机构进行集成。
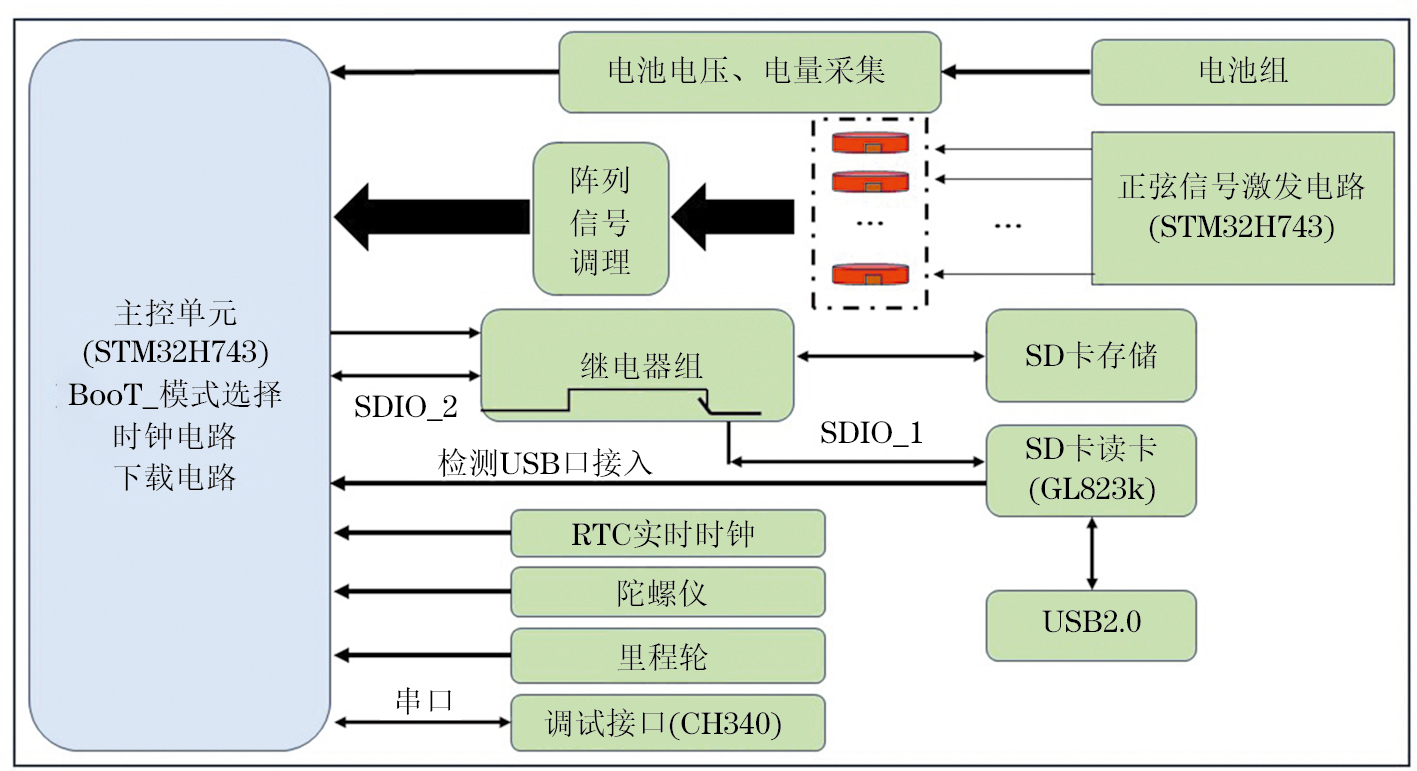
高通过性泡沫清管器的控制系统架构如图4所示,其核心采用STM32H7型微控制器。正弦信号波形激发通过DAC(数字模拟转换)模块配合运算放大器实现,确保激励信号的精准输出。选用mpu6050型陀螺仪提供高稳定性姿态数据。里程轮采用磁编码芯片,精确记录行走距离。数据存储利用STM32H7的SDIO(全数字输入输出接口)功能实现,数据导出则通过USB2.0芯片实现,实测速度超过30 m·s−1。电子系统协同工作,能够满足复杂环境下的高精度控制和数据采集、存储、导出的需求。
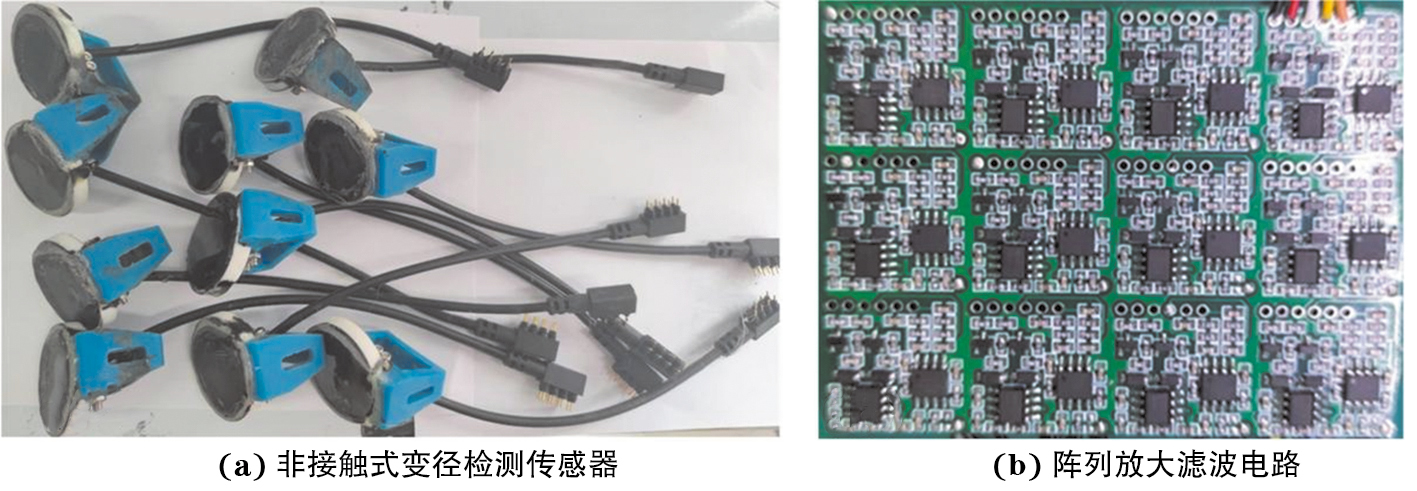
高通过性变径检测探头及阵列调理电路实物如图5所示。非接触式变径检测传感器主要包括:激励线圈、TMR磁敏元件、PCB电路板、线圈骨架、封装外壳、支撑结构等[见图5(a)]。激励线圈由漆包线缠绕制成,在电流型信号发生模块的激励作用下,产生交变励磁场。TMR磁敏元件是一种基于磁阻原理的传感器,即电阻随外部磁场强度改变,用于提取空间中的复合磁通信号,并将磁信号转化为电压信号。PCB电路板上预留了焊盘位置,起到固定TMR线性传感器的作用。骨架是激励线圈和磁敏元件的载体。其采用3D打印制成,起到固定和限位的作用。对探头整体进行浇筑,可使传感器各部件的相对位置完全固定。
非接触式变径检测传感器中的阵列TMR磁敏元件获取的空间磁通微弱,包含着大量的无关噪声信号,不利于管道变形特征的识别。为此,笔者设计了以SGM722为基础的两级放大RC滤波电路,剔除无关频率的噪声信号,提高缺陷响应信号的信噪比。阵列放大滤波电路如图5(b)所示。
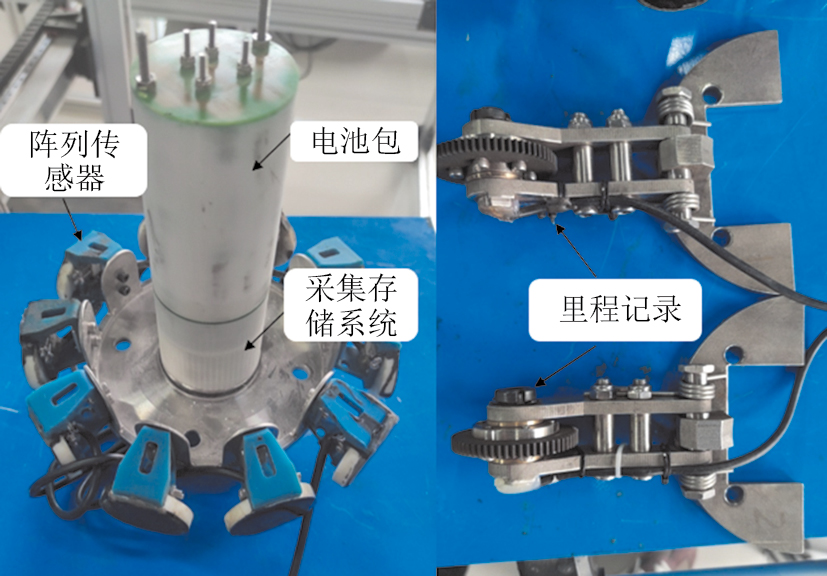
将传感器周向阵列布置,采用电子系统进行数据采集、存储、导出,电子系统和里程轮实物如图6所示。10个阵列布置的传感器获取的管道变径量与两路里程通道通过转接电路进行数据转换,并通过转接盒传输至机芯中的数据采集存储系统进行离线的数据存储。当检测完成后,通过高速USB2.0接口进行检测数据的快速导出。
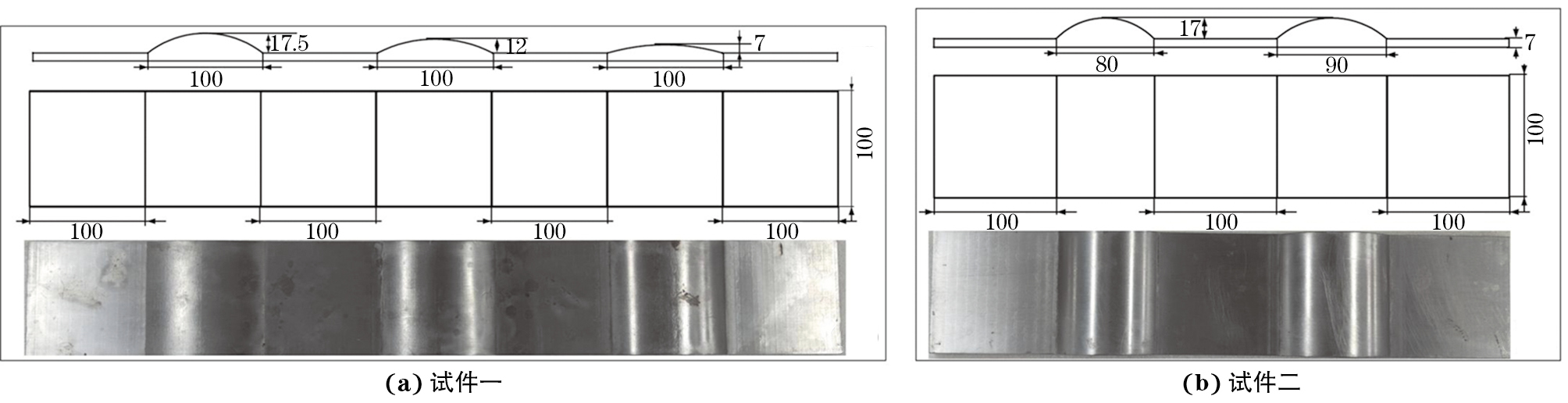
(1)变径试件加工
采用机械加工的方式制作模拟管道变径试件,材料为低碳钢,含有变径的平板试件的设计图及实物如图7所示。其中试件一包含三个长均为100 mm,高度分别为17.5,12.0,7.0 mm的凸起,模拟长度相同、高度不同的管道变径缺陷。试件二包含两个高度均为17 mm,长度分别为80 ,90 mm的凸起,模拟高度相同、长度不同的管道变径缺陷。
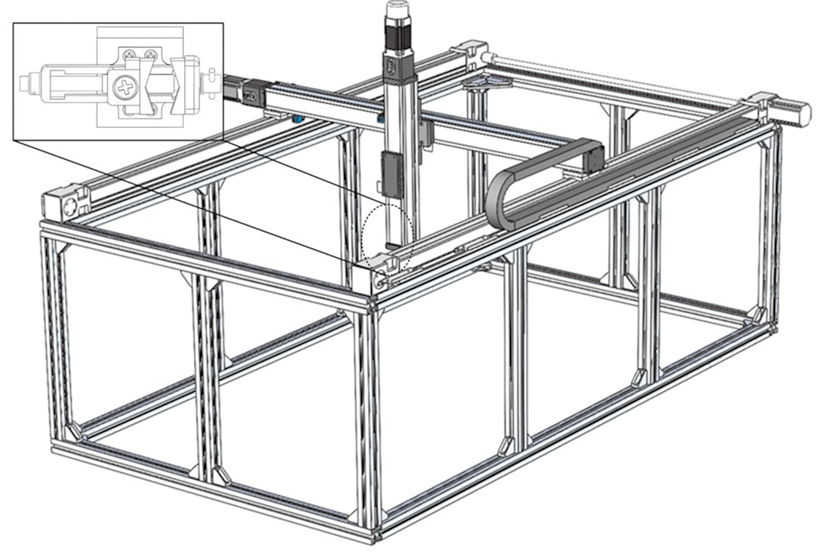
(2)探头动态扫查试验平台
三轴动态扫查试验平台及探头夹持机构如图8所示。该扫查试验平台由滑动连接机构、支撑型材架、控制器、联动板等组成,可以实现x,y,z三轴的联动。滑动连接机构的丝杠型号均为FBL60,行程分别为1 500,900,300 mm。丝杠通过套筒与左连接板和固定板相连接,联轴器一端与丝杠相连接,另一端通过套筒与步进电机相连接。套筒能有效增加丝杠与左连接板和固定板的稳定性。步进电机的型号为FM5756SFD04,适配驱动器型号为FMDD50D40NOM,步进电机与外接电源相连接,空载运行速度最快可达930 mm·s−1,满载运行速度可达500 mm·s−1,模组精度达0.02 mm。通过AMC4030三轴运动控制器实现三轴滑台的自动运动控制。
探头夹持机构由控制机构和夹具组成,控制机构包括工字型连接板、滑杆、固定底板、摇杆等。可以通过旋转摇杆完成两侧夹板的相对运动,实现待测试探头的锁紧。开展试验时,探头在夹持机构的带动下匀速运行,模拟内检测器在管道内的轴向运动。
设置探头与管壁的间距为25 mm,模拟内检测器在管道内运行时的非接触式检测。在试验台夹持机构的带动下对变径试件进行动态扫查,通过集成的电子系统实现检测数据的在线采集、离线存储和数据导出。
圆弧形变形区域的扫查信号如图9所示。整体来看,当探头扫查至圆弧形变形区域时,信号产生畸变,表现出“增加-峰值-减小”的变化规律,呈现“凸”字形的山峰状分布。当探头处于圆弧的正上方区域时,采集到的电压信号出现最大值。这是由于探头处于此位置时,线圈的励磁场引起了试件表面磁畴的有序偏转,感应出强大的磁化磁场Hm,其对线圈衍生的交变励磁场具有显著的增强作用。同时,变形引起的电压变化量ΔV与空间复合磁场变化量ΔB呈正相关,导致信号出现了预期的“凸”字分布规律,并且随着凸起高度D的增加,信号畸变的程度愈加明显。
原始信号如图9(a),(b)所示,可见当凸起长度L固定为100 mm,高度D依次为7,12,17.5 mm时,输出电压的最大变化量ΔVmax依次改变为 0.06,0.16,0.39 V,凸起高度D的变化引起了输出电压的显著畸变。
对原始信号进行包络、提取后的变形响应信号如图9(c),(d)所示,当凸起高度D固定为17 mm,长度依次变化为80 mm和90 mm时,输出电压的最大变化量ΔVmax分别为0.413 V和0.402 V,相差2.66%,可见当凸起高度相同,长度由80 mm改变至90 mm时,对于ΔVmax的影响不大。同时,计算可以得到畸变信号的长度L´分别为102.69 mm和114.82 mm,可见畸变信号的长度会大于变形缺陷的实际长度,这是由于线圈交变励磁场覆盖的区域大于线圈的实际尺寸,线圈在变形区域附近时与凸起产生了电磁耦合作用,故提前出现了变径的响应信号。
该聚氨酯泡沫清管器的变形检测探头采用柔性支撑结构,单侧支撑结构的最大压缩量为30 mm,计算可得该清管器传感系统的最大变形通过能力达110 mm,约为管道外径的40.29%,管道外径为273 mm。开展的传感器动态测试试验结果表明,集成的传感系统变形检测能力优于5 mm(1.83%的管道外径),满足小口径油气管道大变形、高通过能力、高精度内检测的实际需求。
介绍了基于电磁测距原理的非接触式管道变形检测技术,设计开发了高通过性泡沫变形内检测装备的机械支撑结构、传感和集成电子系统。搭建了非接触式动态扫查试验平台,对集成系统进行了动态扫查测试。结果表明,研制的电磁测距检测探头可以实现25 mm提离高度下的非接触式变形检测,其检测阈值优于1.83%管道外径。同时,聚氨酯泡沫清管器具备40%管道外径的变形通过能力,满足未知工况复杂管道的大变形管段检测和定位的实际需求。
文章来源——材料与测试网
浙江国检检测技术股份有限公司 版权所有 【暂无】 百度统计
全国统一服务热线:400-1188-260
客服手机号:13372307781
电话:400 1188 260 质量投诉 +86-573-86161208
邮箱:shhgj@chinazbj.com
地址:浙江省嘉兴市海盐县武原街道丰潭路777号
备案号:浙ICP备05056915号
 浙公网安备 33042402000106号
浙公网安备 33042402000106号
技术支持:追马网
 客服微信号
客服微信号
 微信公众号
微信公众号